
Contents
- From keypoints to correspondences
- Estimating canonical orientation
- Feature descriptors
- Feature matching
- Estimating homographies from feature
- Orientation
- Pose
- The perspective camera model
- Pose from a known 3D map
- An introduction to nonlinear least squares
- How can solve the indirect tracking problem?
- Problem formulation
- Linear least squares
- Nonlinear least squares
- Nonlinear MAP inference for state estimation
- Linearization
- Solving the nonlinear problem
- The Gauss-Newton algorithm
- Trust region
- The Levenberg-Marquardt algorithm
- Levenberg-Marquardt optimization
- What about measurement noise?
- Weighted nonlinear least squares
- Estimating uncertainty in the MAP estimate
- Optimizing over poses
From keypoints to correspondences
Local patches
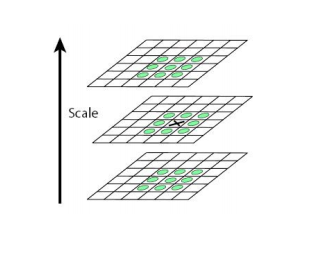
- Covariant feature point detectors
- Location (x, y), scale σ and orientation θ.
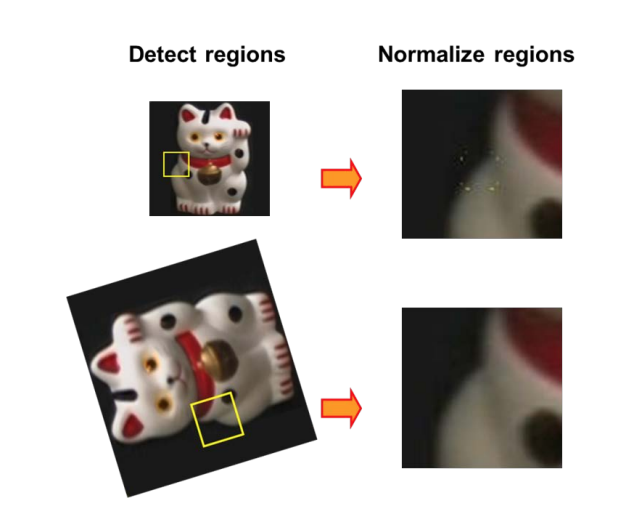
- Normalize local patches surrounding keypoints
- Canonical scale
- Canonical orientation
Estimating canonical orientation
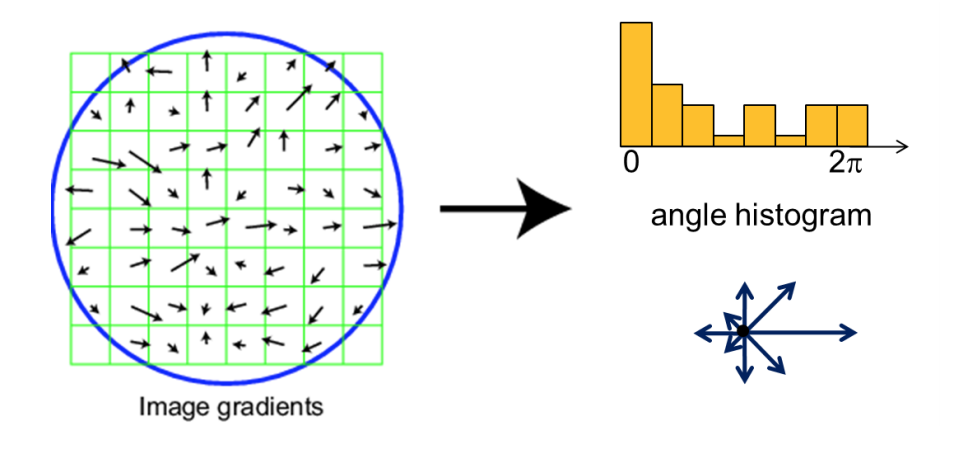
- Find dominant orientation of the image patch
- This is given by xmax, the eigenvector of M corresponding to λmax (the larger eigenvalue)
- Rotate the patch according to this angle
- Orientation from Histogram of Gradients (HoG)
Local patches
- Covariant feature point detectors
- Location (x, y), scale σ and orientation θ.
- Normalize local patches surrounding keypoints
- Canonical scale
- Canonical orientation
- Covariant feature point detectors
- Affine transformation A
- Normalize local patches surrounding keypoints
- Canonical affine transformation
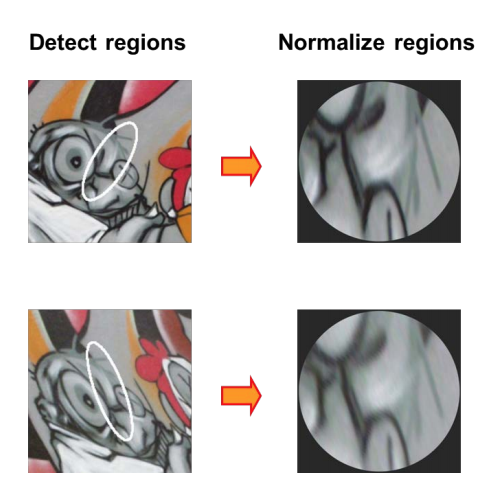
- Canonical affine transformation
Overview of point feature matching
- Detect a set of distinct feature points
- Define a patch around each point
- Extract and normalize the patch
- Compute a local descriptor
- Match local descriptors
Feature descriptors
-
Simplest descriptor: Vector of raw intensity values
- How to compare two such vectors?
- Sum of squared differences (SSD)
- Sum of squared differences (SSD)
- Normalized correlation
Feature descriptors
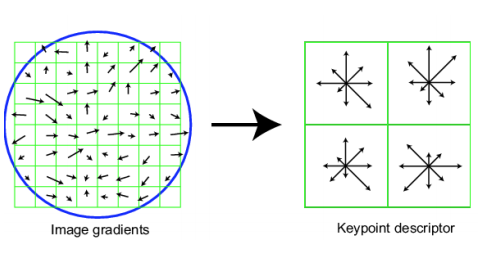
Histogram of Gradients (HOG) descriptors
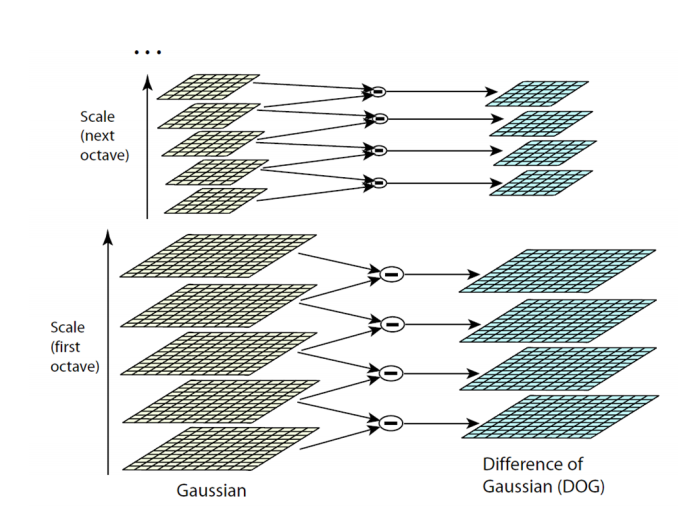
SIFT detector
Patch at detected position, scale, orientation

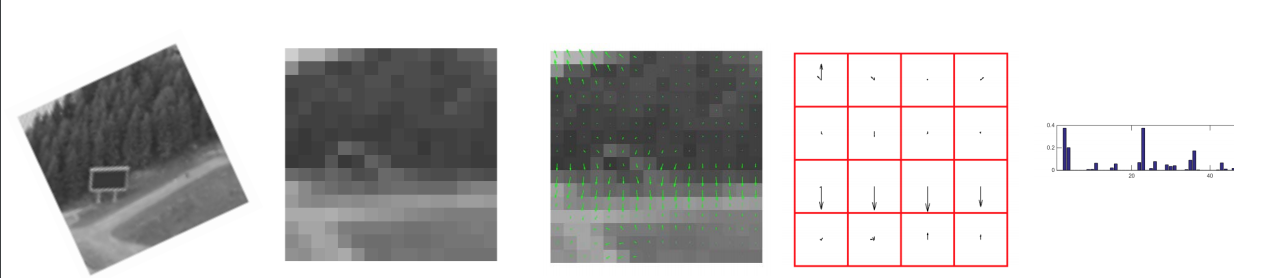
- Extract patch around detected keypoint
- Normalize the patch to canonical scale and orientation
- Resize patch to 16x16 pixels
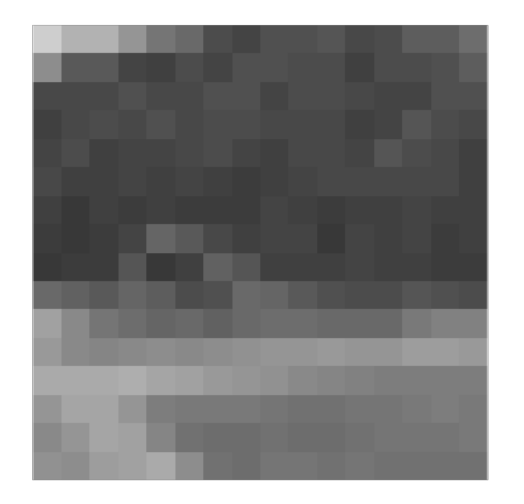
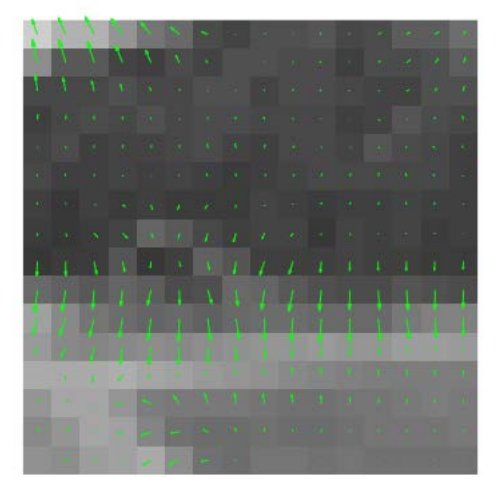
- Compute the gradients
- Unaffected by additive intensity change
- Apply a Gaussian weighting function
- Weighs down gradients far from the centre
- Avoids sudden changes in the descriptor with small changes in the window position
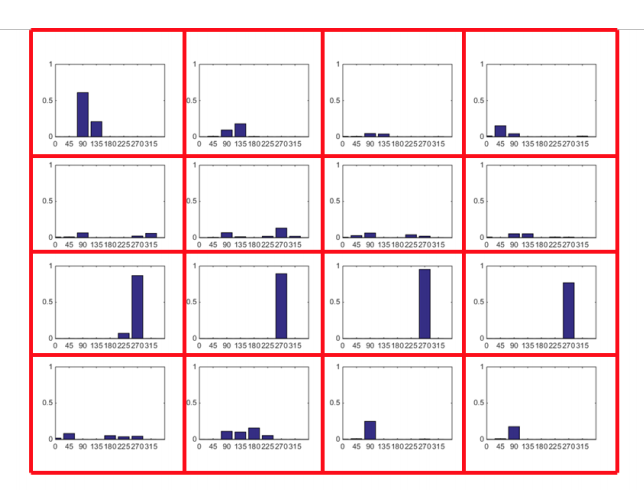
- Divide the patch into 16 4x4 pixels squares
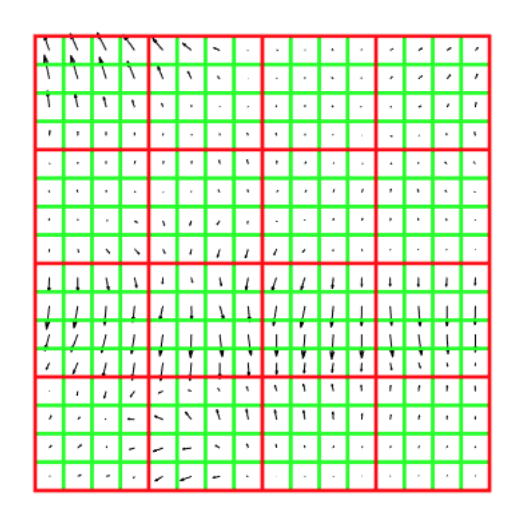
- Compute gradient direction histograms over 8 directions in each square
- Trilinear interpolation
- Robust to small shifts, while preserving some spatial information
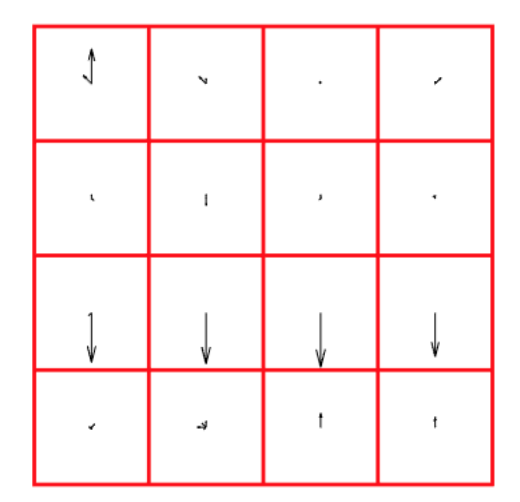
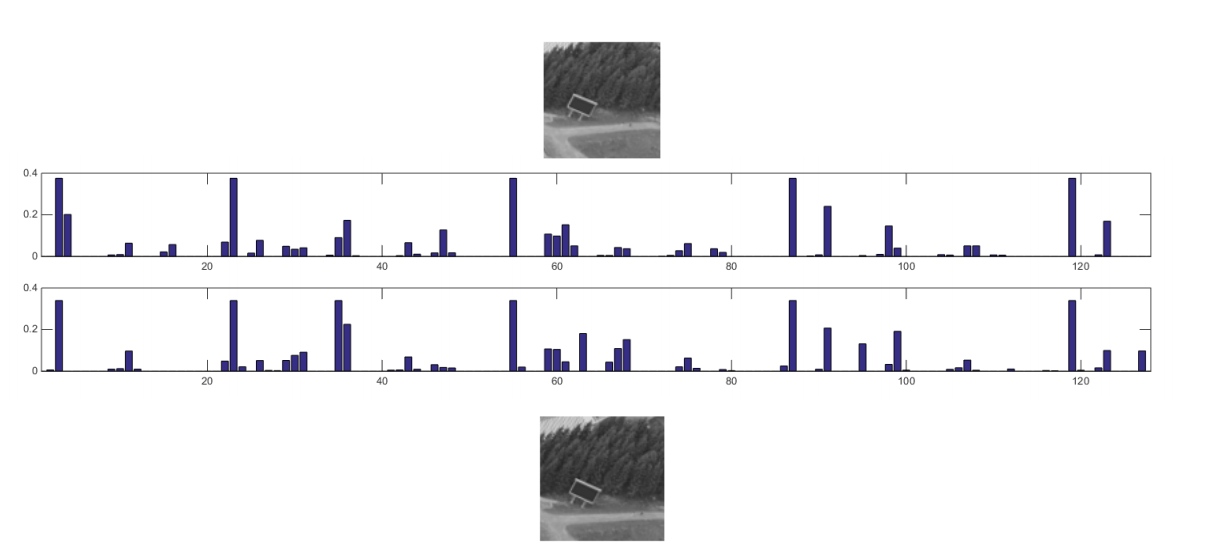
- Concatenate the histograms to obtain a 128 dimensional feature vector
- Normalize to unit length
- Invariant to multiplicative contrast change
- Threshold gradient magnitudes to avoid excessive influence of high gradients
- Clamp gradients > 0.2
-
Renormalize
 Example: Feature comparison
Example: Feature comparison
 SIFT summary
SIFT summary
- Extract a 16x16 patch around detected keypoint
- Compute the gradients and apply a Gaussian weighting function
- Divide the window into a 4x4 grid of cells
- Compute gradient direction histograms over 8 directions in each cell
- Concatenate the histograms to obtain a 128 dimensional feature vector
- Normalize to unit length
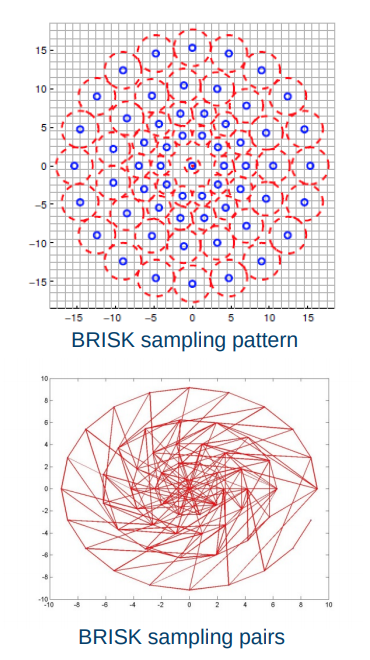
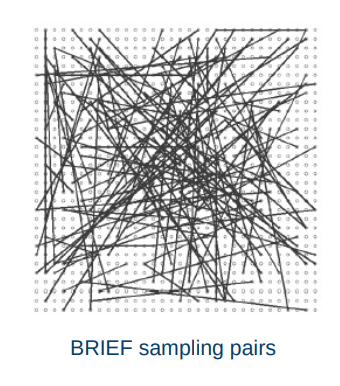
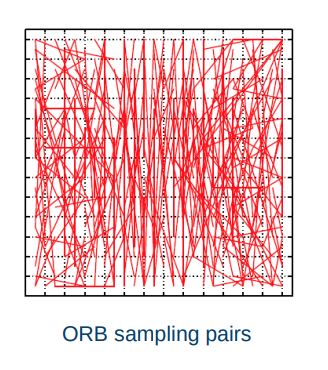
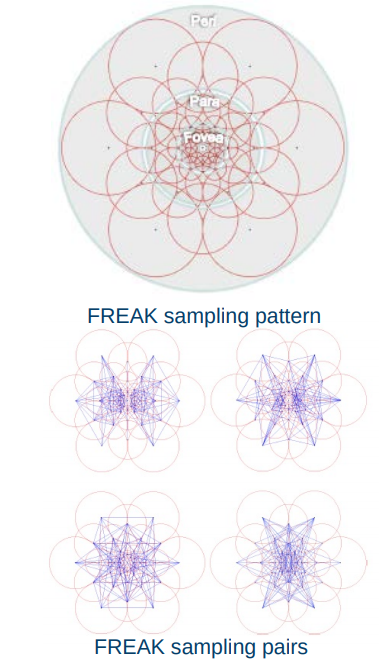
Binary descriptors
- Extremely efficient construction and comparison
- Based on pairwise intensity comparisons
- Sampling pattern around keypoint
- Set of sampling pairs
- Feature descriptor vector is a binary string:
-
Matching using Hamming distance:
Binary descriptors
- Often achieves very good performance compared to SIFT/SURF
-
Much faster than SIFT/SURF
Feature matching
Overview of point feature matching
- Detect a set of distinct feature points
- Define a patch around each point
- Extract and normalize the patch
- Compute a local descriptor
- Match local descriptors
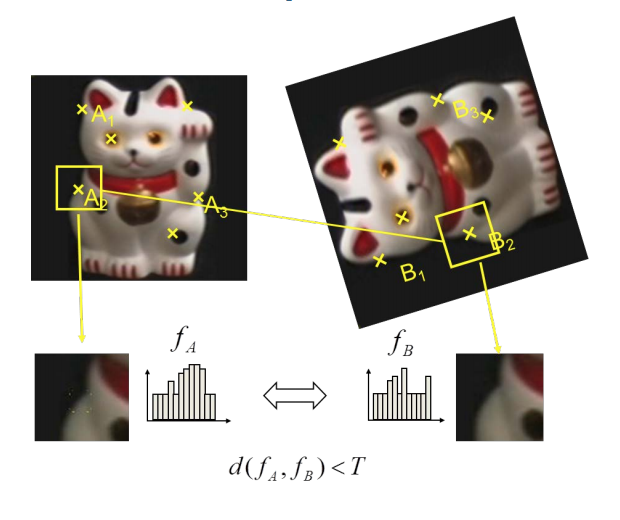
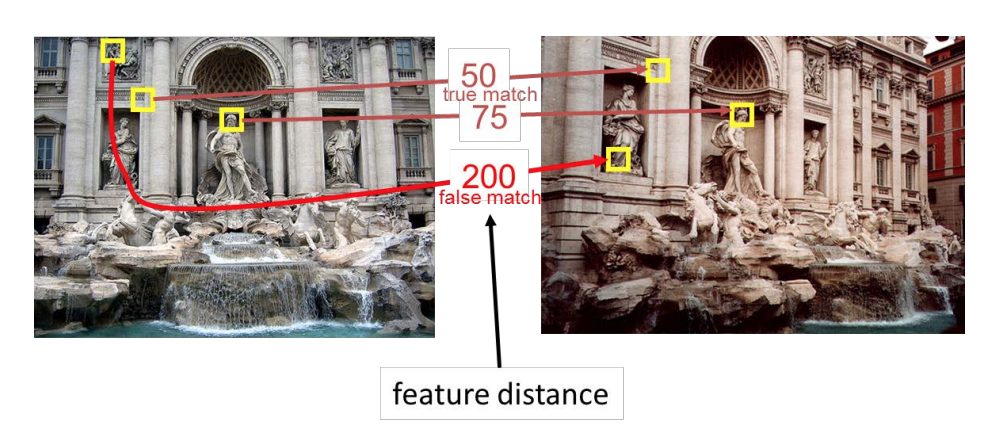
Distance between descriptors
- Define distance function that compares two descriptors
- L1 distance (SAD):
- L2 distance (SSD):
- Hamming distance:
- L1 distance (SAD):
At which threshold do we get a good match?
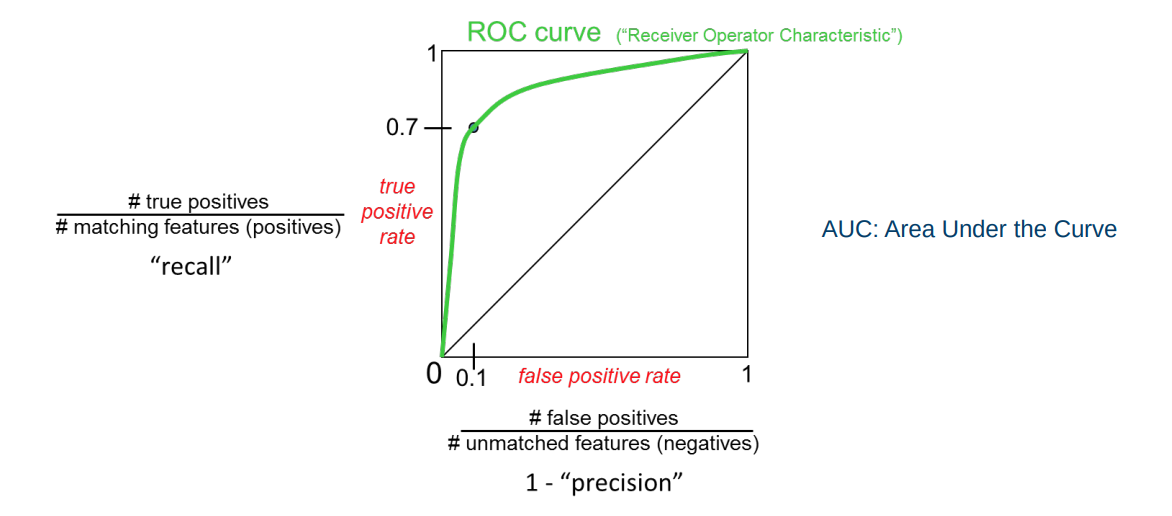
Evaluating matching performance
AUC: Area Under the Curve
Matching strategy
- Compare all
- Take the closest
- Or k closest
- And/or within a (low) thresholded distance
-
Choose the N best putative matches
Which matches are good?
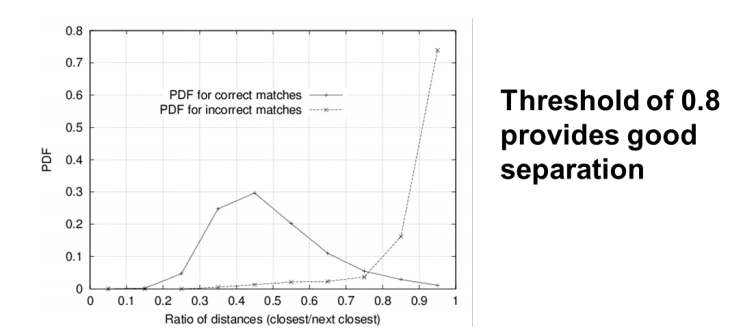
Nearest Neighbour Distance Ratio
- For a descriptor \(f_a\) in \(I_a\), take the two closest descriptors \(f_b1\) and \(f_b^2\) in \(I_b\)
- Perform ratio test: \(\frac{d(fa, fb1)}{d(fa, fb2)}\)
- Low distance ratio: \(f_b^1\) can be a good match
- High distance ratio: \(f_b^1\) can be an ambiguous or incorrect match

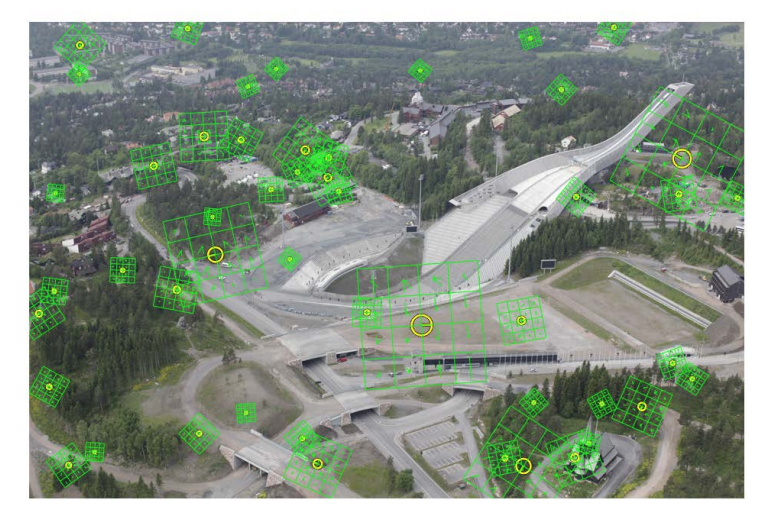
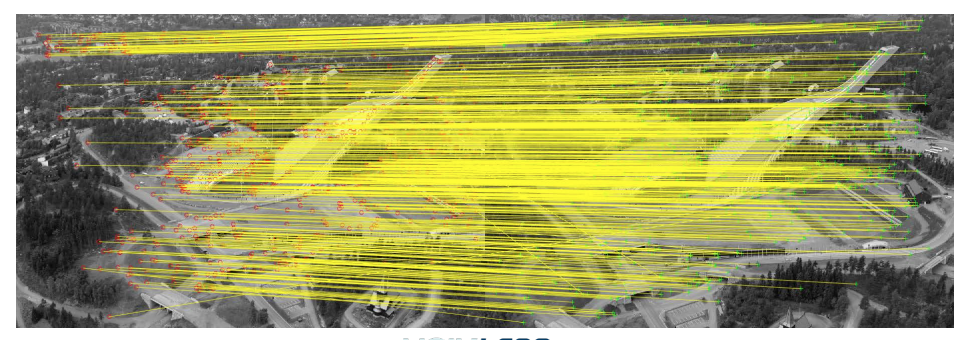
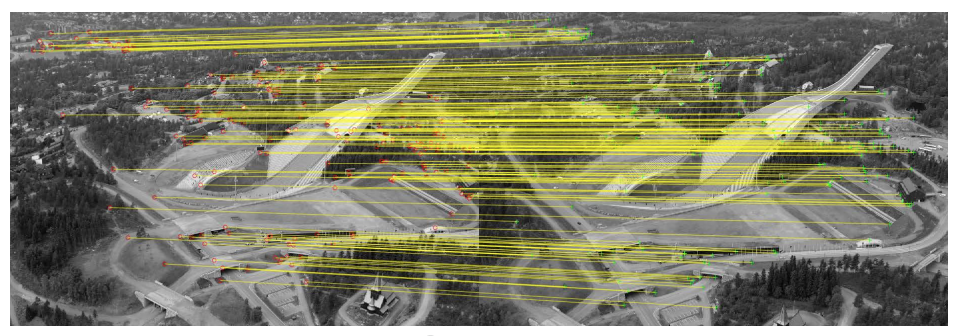
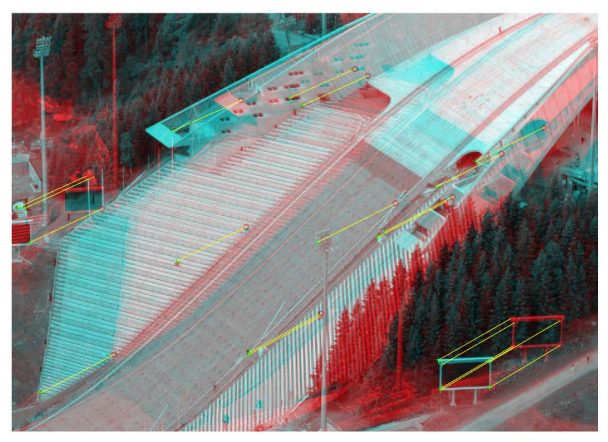
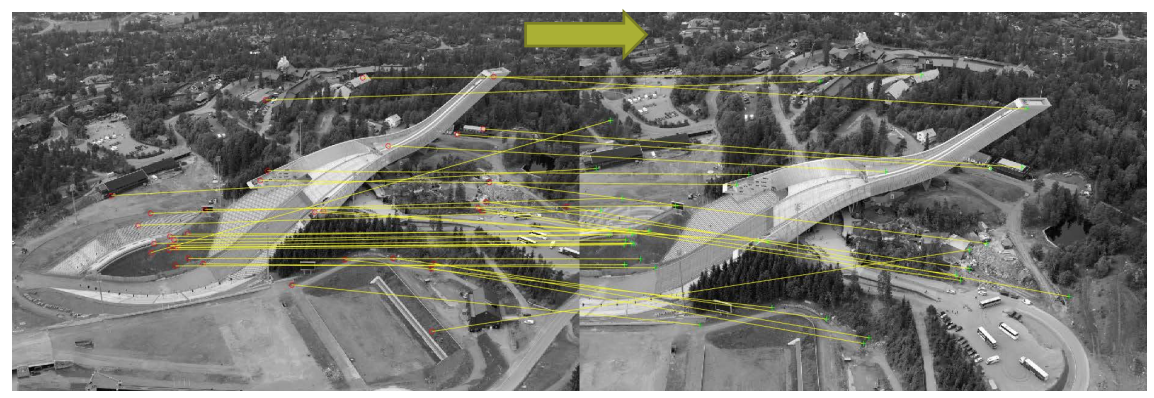
Example: Holmenkollen
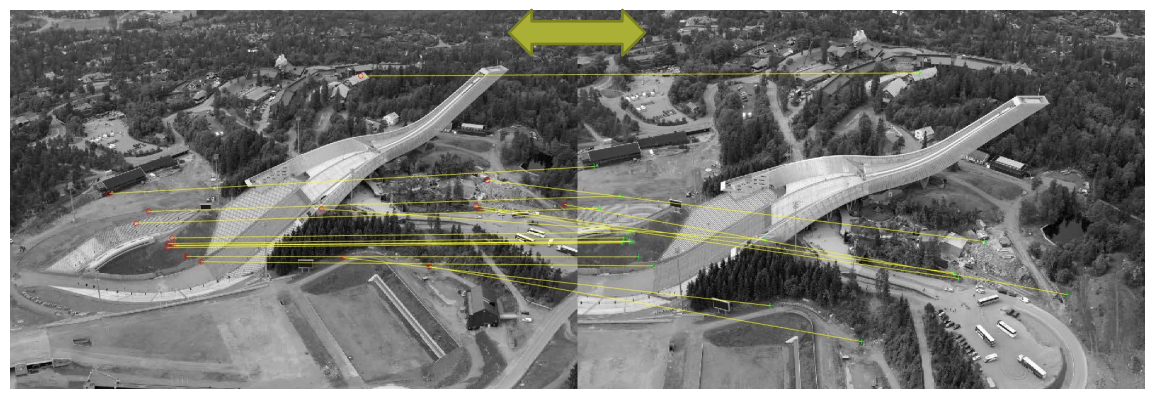
Cross check test
- Choose matches \((fa, fb)\) so that
- \(fb\) is the best match for fa in \(Ib\)
-
And fa is the best match for \(fb\) in Ia
Matching algorithms
- Comparing all features works well for small sets of images
- Brute force: BFMatcher in OpenCV
- When the number of features is large, an indexing structure is required
- For example a k-d tree
- Training an indexing structure takes time, but accelerates matching
- FlannBasedMatcher in OpenCV
Summary
- Matching keypoints
- Comparing local patches in canonical scale and orientation
- Feature descriptors
- Robust, distinctive and efficient
- Descriptor types
- HoG descriptors
- Binary descriptors
- Putative matching
- Closest match, distance ratio, cross check
- Next lecture
- Matches that fit a model
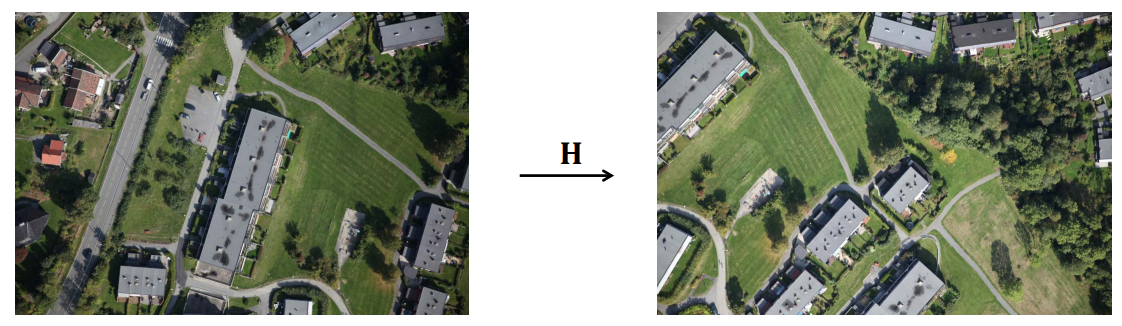
Estimating homographies from feature
Homographies induced by central projection
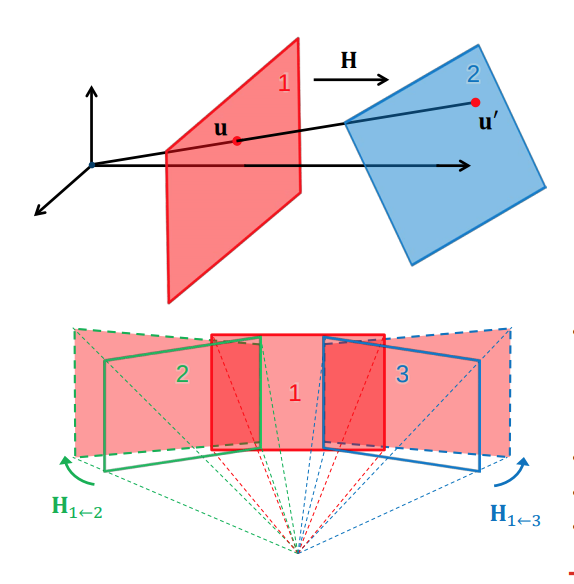
- Point-correspondences can be determined automatically
- Erroneous correspondences are common
-
Robust estimation is required to find \(H\)
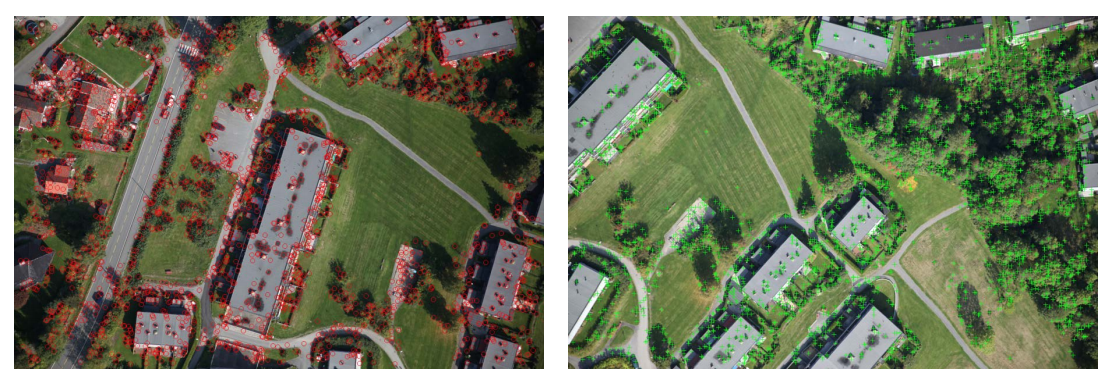
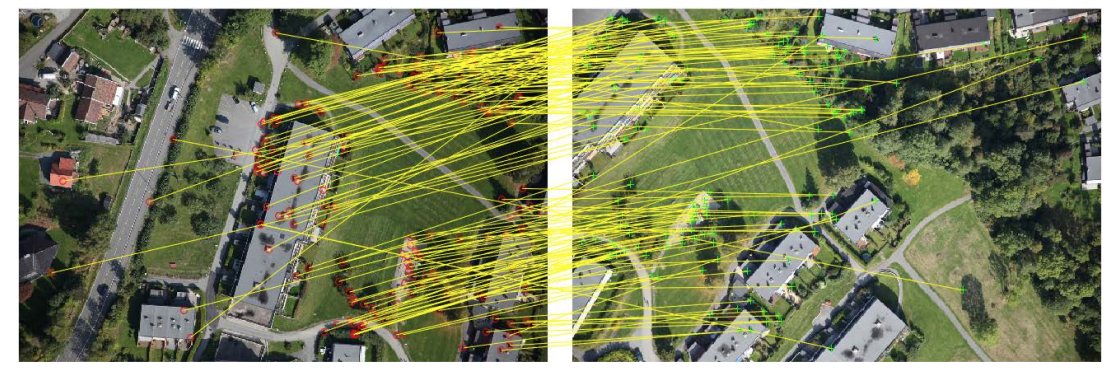
Estimating the homography between overlapping images
- Establish point correspondences \(u_i ↔ u'_i\)
- Find key points \(u_i ∈ Img_1\) and \(u'_i ∈ Img_2\)
- Represent key points by suitable descriptors
- Determine correspondences \(u_i ↔ u'_i\) by matching descriptors
- Some wrong correspondences are to be expected
- Estimate the homography \(H\) such that \(u'_i = Hu_i ∀ i\)
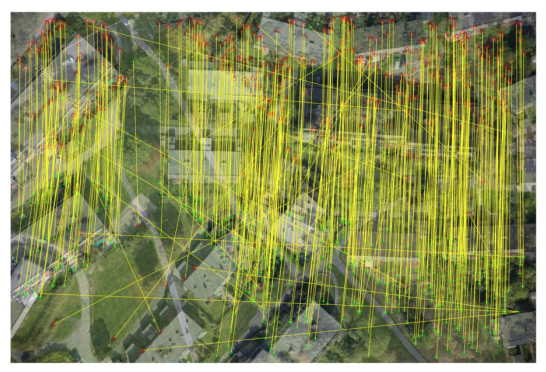
- Robust estimation with RANSAC
- Improved estimation based on RANSAC inliers
- This homography enables us to compose the images into a
larger image
- Image mosaicing
- Panorama
Adaptive RANSAC
Objective: To robustly fit a model \(y = f(x;\alpha)\) to a data set \(S\) containing outliers
Algorithm
- Let \(N = ∞, S_{IN} = ∅\) and \(#iterations = 0\)
- while \(N > #interations\) repeat 3-5
- Estimate parameters \(\alpha_{tst}\) from a random n-tuple from S
- Determine inlier set \(S_t\) i.e. data points within a distance \(i\) of the model \(y = f(x;\alpha_{txt})\)
- If \(\|S_{txt}\| > \|S_{IN}\|\), set \(S_{IN} = S_{txt}, \alpha = \alpha_{tst}, \omega = \frac{\|S_{IN}\|}{\|S\|}\) and \(N = \frac{log(1-p)}{log(1-\omega^n)}\) with \(p = 0.99\) Increase \(#iteratons\) by 1
Estimating the homography
- Estimating the homography in a RANSAC scheme requires
- A basic homography estimation method for 𝒏𝒏 point-correspondences
- A way to determine the inlier set of point-correspondences for a given homography
- The homography has 8 degrees of freedom, but it is custom to treat all 9 entries of the matrix as unknowns instead of setting one of the entries to 1 which excludes all potential solutions where this entry is 0
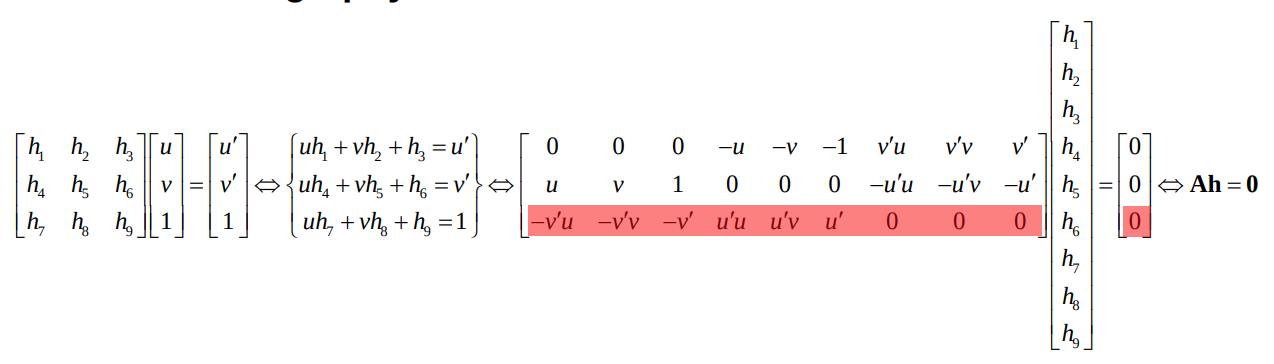
Basic homography estimation
Observe that the third row in A is a linear combination of the first and second row
Hence every correspondence \(u_i ↔ u'_i\)contribute with 2 equations in the 9 unknown entries
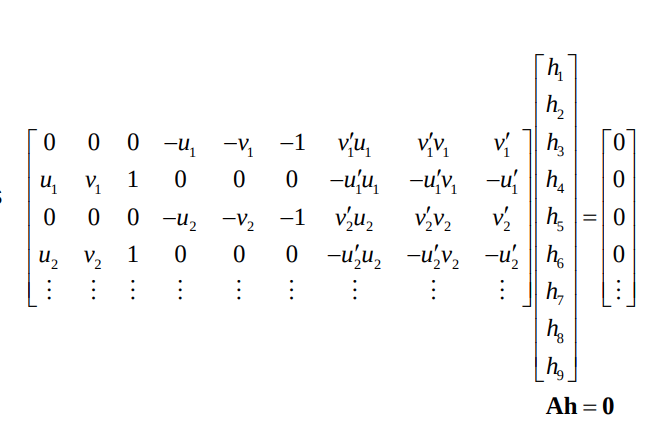
Basic homography estimation
-
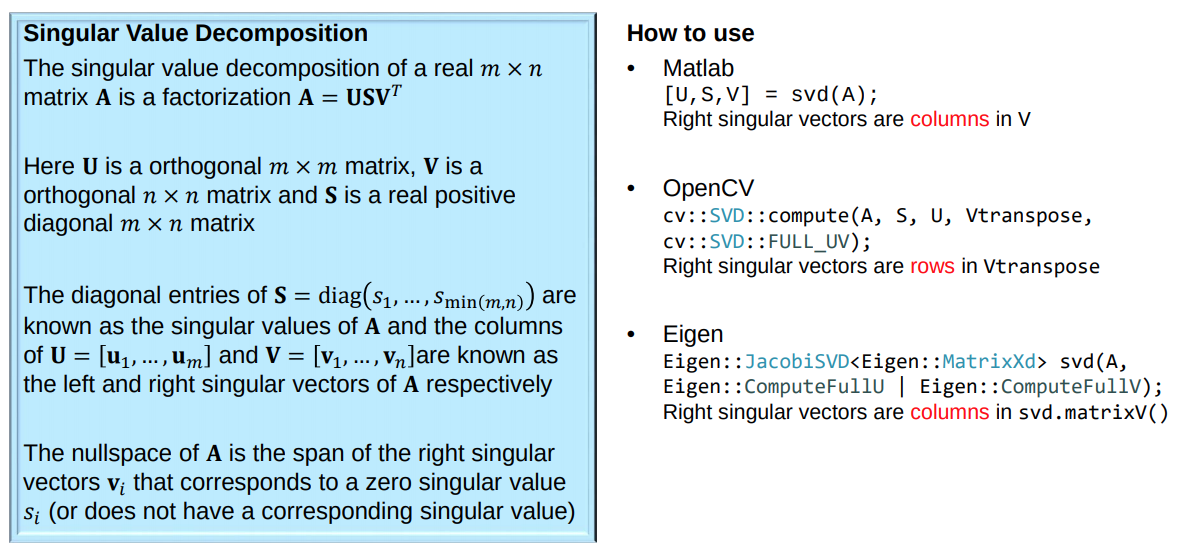
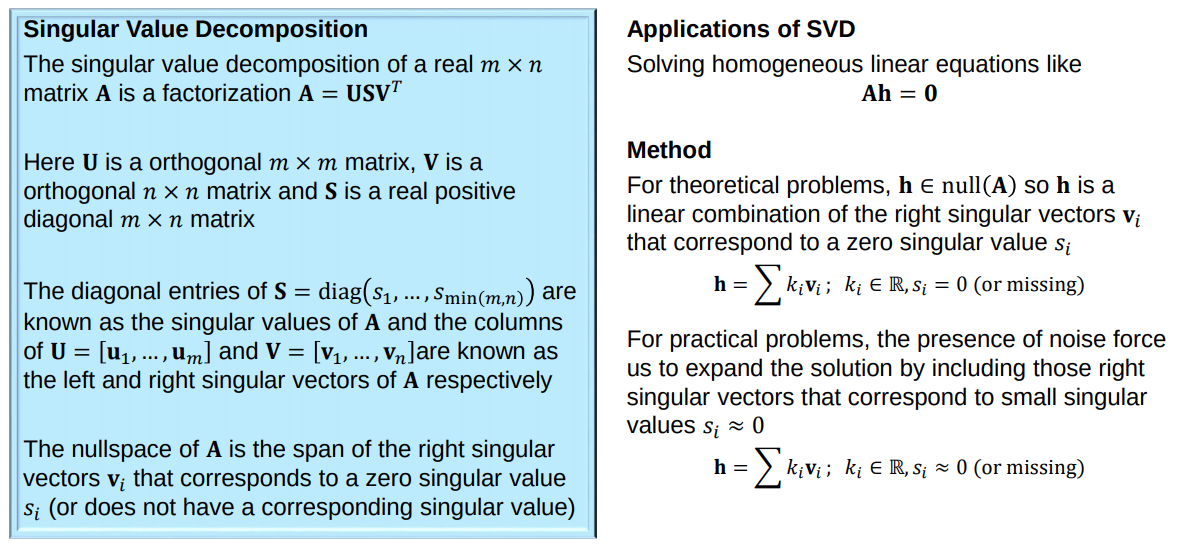
Since H (and thus h) is homogeneous, we only need the matrix A to have rank 8 in order to determine h up to scale
-
It is sufficient with 4 point correspondences where no 3 points are collinear
- We can calculate the non-trivial solution to
the equation \(Ah = 0\) by SVD
- \[svd(A) = USV^T\]
-
The solution is given by the right singular vector without a singular value which is the last column of V, i.e. \(h = v_9\)
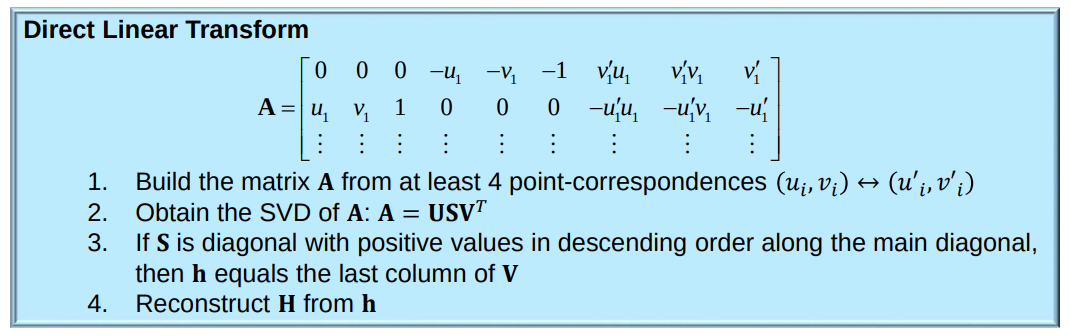
- The basic DLT algorithm is never used with more than 4 point-correspondences
- This is because the algorithm performs better when all the terms of 𝐴𝐴 has a similar scale
- Note that some of the terms will always be of scale 1
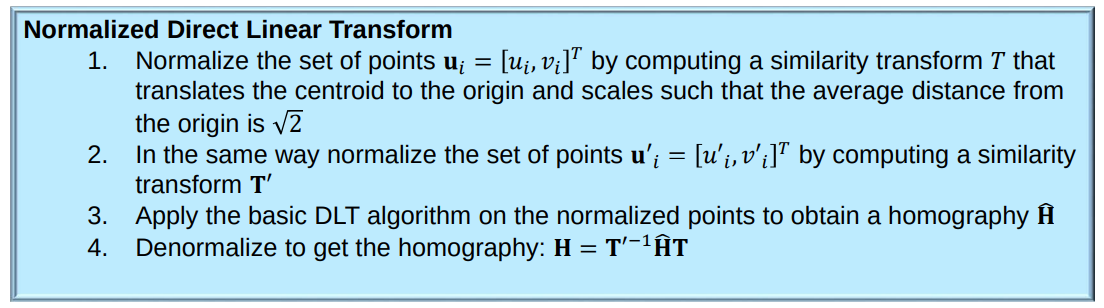
-
To achieve this, it is common to extend the algorithm with a normalization and a
denormalization step
- Estimating the homography in a RANSAC scheme requires
- A basic homography estimation method for 𝑖𝑖 point-correspondences
- A way to determine the inlier set of point-correspondences for a given homography
Robust homography estimation
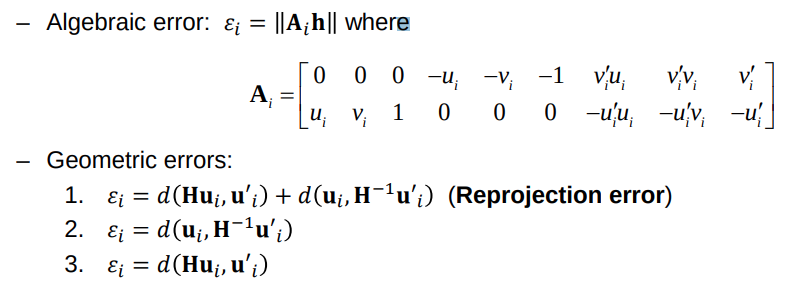
- Finally we would typically re-estimate \(H\) from all correspondences in \(S_{IN}\)
- Normalized DLT
- Minimize \(ϵ = ∑ϵ_i\) in an iterative optimization method like Levenberg Marquardt
Image mosaicing

-
Let us compose these two images into a larger image
-
Find key points and represent by descriptors
- Establish point-correspondences by matching descriptors
-
Several wrong correspondences
- Establish point-correspondences by matching descriptors
- Several wrong correspondences
- Estimate homography \(Hũ = ũ'\)
- OpenCV
#include "opencv2/calib3d.hpp" cv::findHomography(srcPoints, dstPoints, CV_RANSAC); - Matlab
tform = estimateGeometricTransform(srcPoints,dstPoints,’projective’); - Represent the images in common coordinates (Note the additional translation!)
- OpenCV
#include "opencv2/calib3d.hpp" cv::warpPerspective(img1, img2, H, output_size); - Matlab
img2 = imwarp(img1,tform); - Now we can compose the images
 Blending with a ramp + histogram equalization
Blending with a ramp + histogram equalization
SVD
Orientation
- A term describing the relationship between coordinate frames
-
Orientation ↔ Rotation
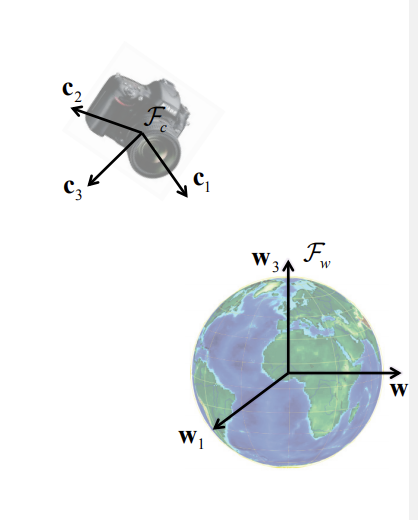
-
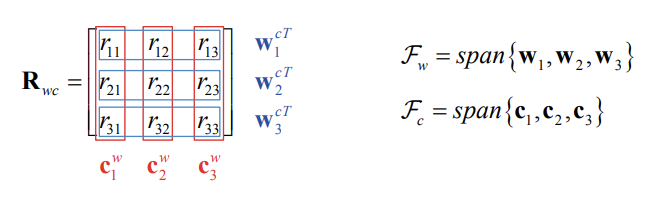
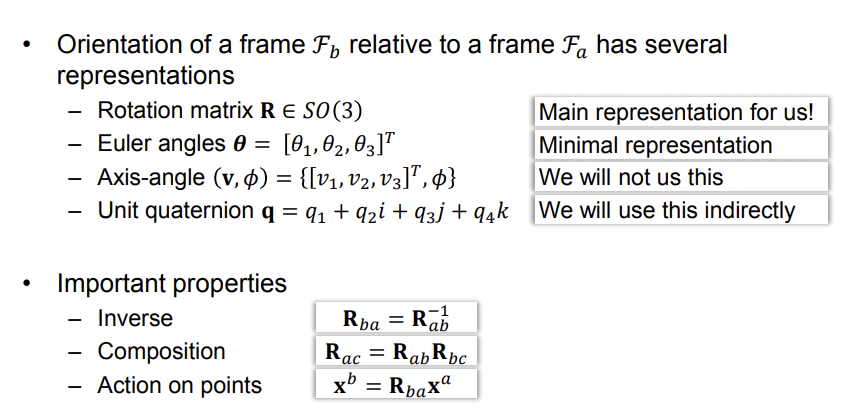
The orientation of the camera frame \(F_c\) with respect to the world frame \(F_w\) can be represented by an orthonormal rotation matrix
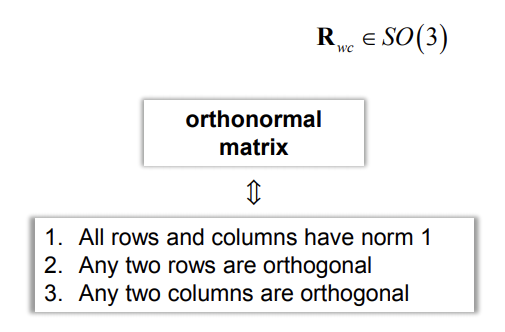
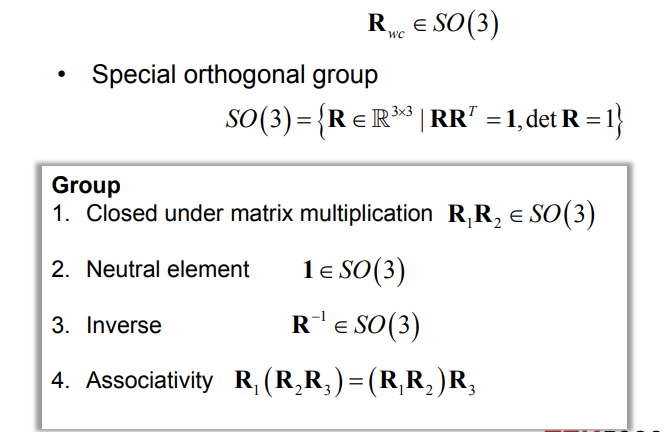
-
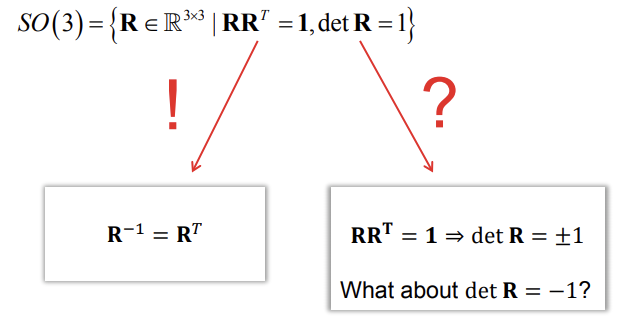
Special orthogonal group
- Construction from orthonormal basis vectors
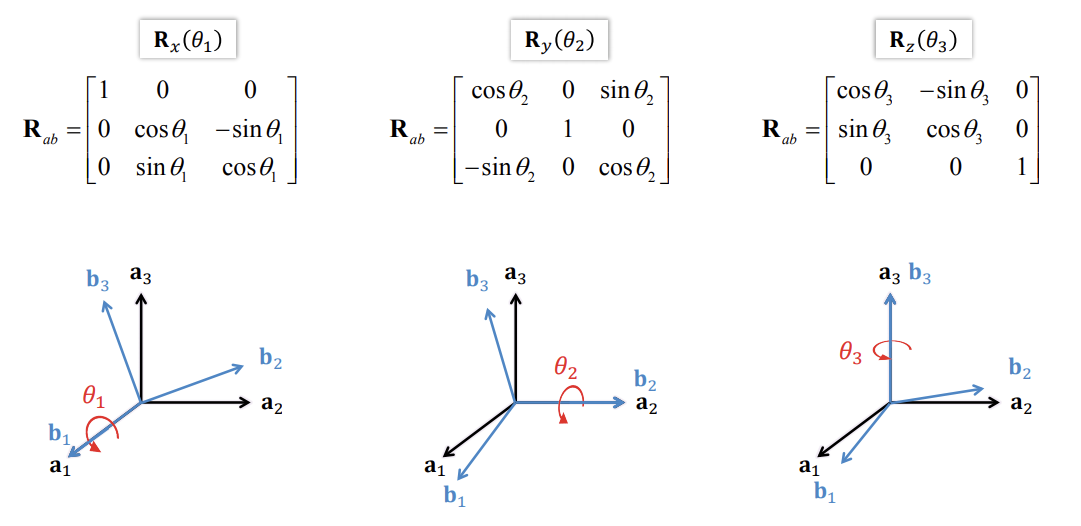
Principal rotations
Action on points
-
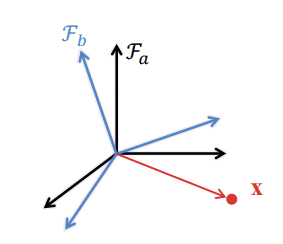
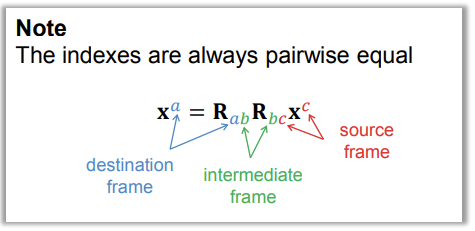
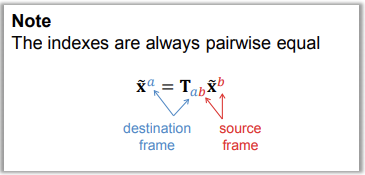
The matrix \(R_{ab}\) represents the orientation of \(F_b\) relative to \(F_a\), but it is also a point transformation from \(F_b\) to \(F_a\) given that the frames have the same origin
-
A point \(x\) can be transformed from \(F_b\) to \(F_a\) by \(x^a = R_{ab}x^b\)
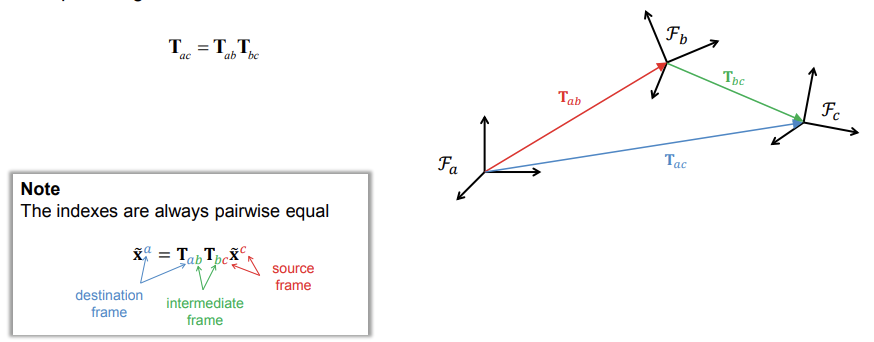
Composition
-
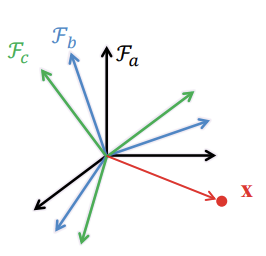
We can chain together consecutive orientations
- If \(R_{ab}\) is the orientation of \(F_a\) relative to \(F_a\) and \(R_{bc}\) is the
orientation of \(F_c\) relative to \(F_b\), then the orientation of \(F_c\)
relative to \(F_a\) is given by \(R_{ac} = R_{ab}R_{bc}\)
- Issue with numerical precision

- Normalization

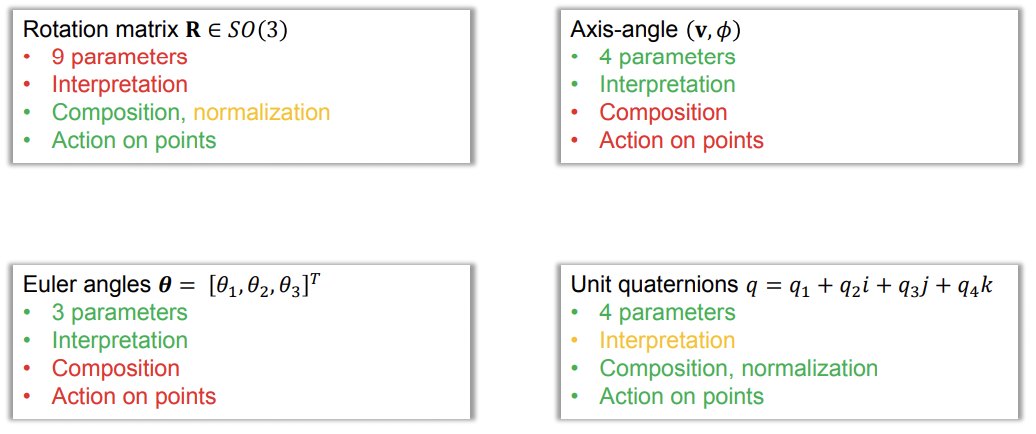
Other representations
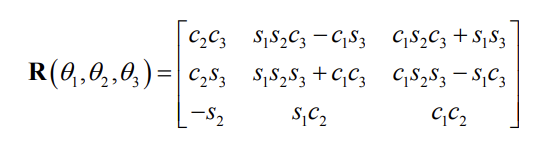
Euler angles
- Any orientation can be decomposed into a sequence of three principal rotations

- The orientation can be represented by the three angles \((\theta_1,\theta_2,\theta_3)\) known as Euler angles
- Several sequences can be used

- To understand Euler angles, we must know the sequence they came from!
- All sequences have singularities, i.e. orientations where the angles of the sequence are not unique
- Problematic if we want to recover Euler angles from a rotation matrix
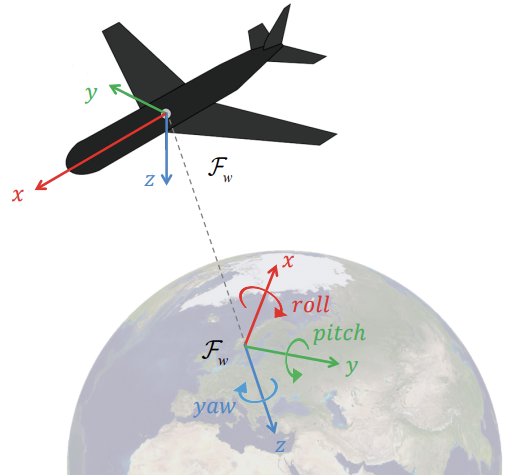
- (roll, pitch, yaw) is often used in navigation to represent the orientation of a vehicle
- The orientation is often described relative to a local North-East-Down (NED) coordinate frame \(F_w\) in the world situated directly below the body frame \(F_b\)
- Then the yaw angle is commonly referred to as «heading» since it corresponds to the compass direction
-
North corresponds to 0°, east 90° and so on
-
-
The roll-pitch-yaw sequence \(R_zR_yR_x\) is singular when \(\theta_2 = \frac{\pi}{2}\)
- (roll, pitch, yaw) is practical for vehicles not
- Most airplanes, cars and ships
- (roll, pitch, yaw) provides an intuitive understanding about the orientation
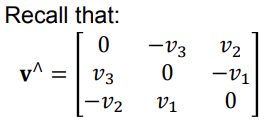
Axis angle
-
Euler’s rotation theorem states that the most general motion of a rigid body with one point fixed is a rotation about an axis through that point
- So we can represent any orientation by a pair \((v, \phi)\) where \(v = [v_1, v_2, v_3]T\) is the axis of rotation and \(\phi\) is the angle of rotation
- This representation is intuitive, but typically not used for computations
- The corresponding rotation matrix is
\(R_{ab} = cos\phi1 + (1 - cos\phi) vv^T + sin\phi\hat{v}\)
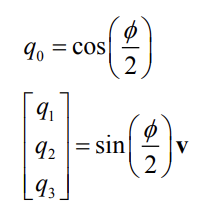
Unit quaternions
- Quaternions are 4D complex numbers
 defined by
defined by
-
Norm:
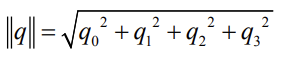
- Unit quaternions \((\|q\| = 1)\) is a popular representation for orientation/rotation
-
The complex terms are closely related to the axis of rotation, while the real term is closely related to the angle of rotation
- Composition \(q_{ac} = q_{ab}q_{bc}\) is very efficient
- 16 multiplications and 12 additions
- Matrix multiplication: 27 multiplications and 18 additions
- Limited numerical precision ⇒ Normalization (divide by \(\|q\|\) )
- Inverse of unit quaternions

-
Action on point a 𝐱𝐱𝑎𝑎 can be expressed as a product \(p^b = q_{ab}p^aq_{ab}\) where points are represented as quaternions with zero real term

- The rotation matrix corresponding to the unit quaternion
Pros and cons
Summary
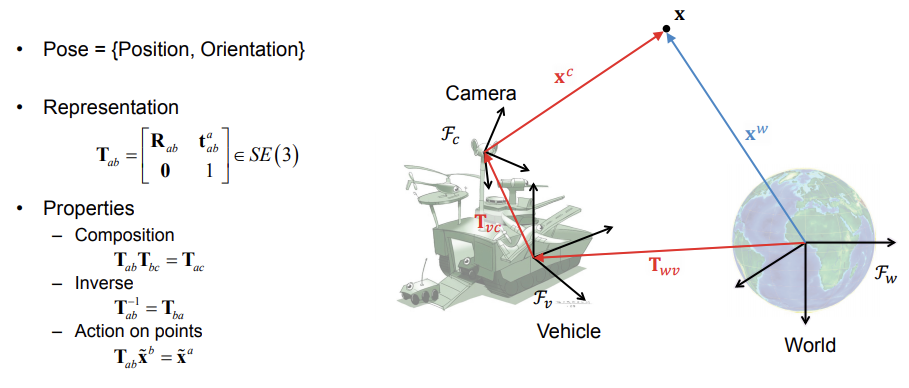
Pose
- A term describing the relationship between coordinate frames
-
Pose = {Position, Orientation}
-
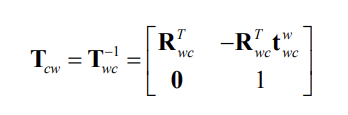
The pose of the camera frame \(F_c\) with respect to the world frame \(F_w\) can be represented by the Euclidean transformation matrix
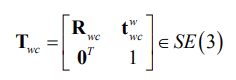 where \(R_{wc} \in SO(3)\) is a rotation matrix and \(t_{wc}^w \in R^3\) is a
translation vector given in world coordinates
where \(R_{wc} \in SO(3)\) is a rotation matrix and \(t_{wc}^w \in R^3\) is a
translation vector given in world coordinates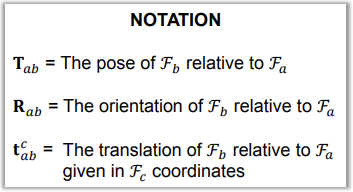

- In illustrations we often represent the pose as an arrow similar to that of the translation vector
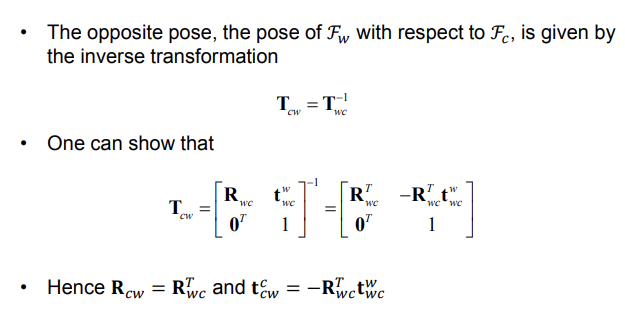
Pose - Invers
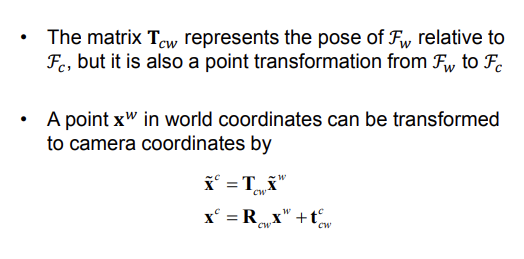
Pose - Action on points
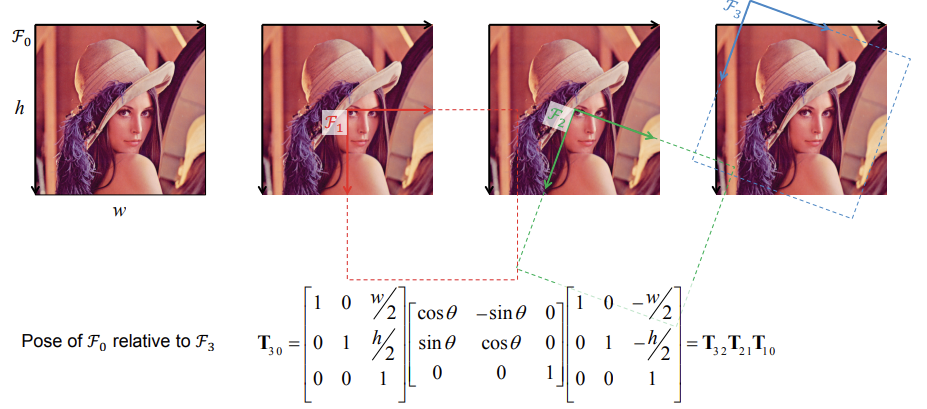
Pose - Composition
- We can chain together consecutive poses by compounding transformation matrices
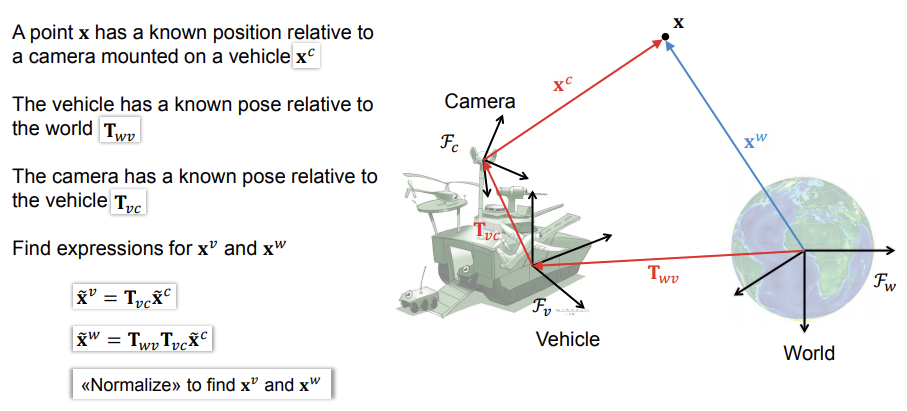
Example - Camera on a vehicle in the world
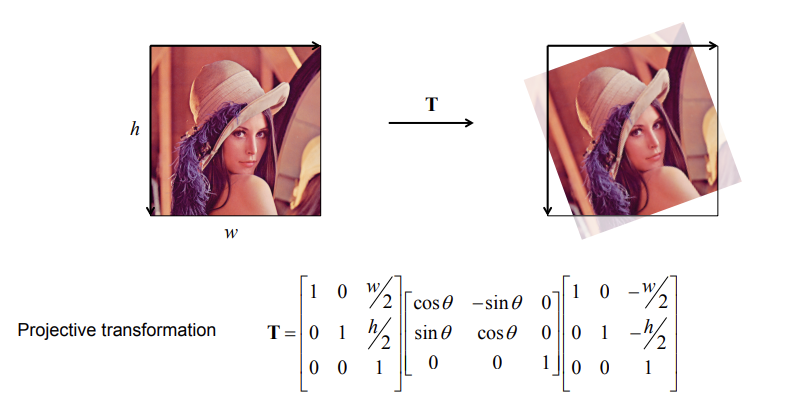
Example - Image rotation about center
Summary
The perspective camera model
A mathematical model that describes the viewing geometry of pinhole cameras
It describes how the perspective projection maps 3D points in the world to 2D points in the image
Combined with a distortion model, the perspective camera model can describe the viewing geometry of most cameras
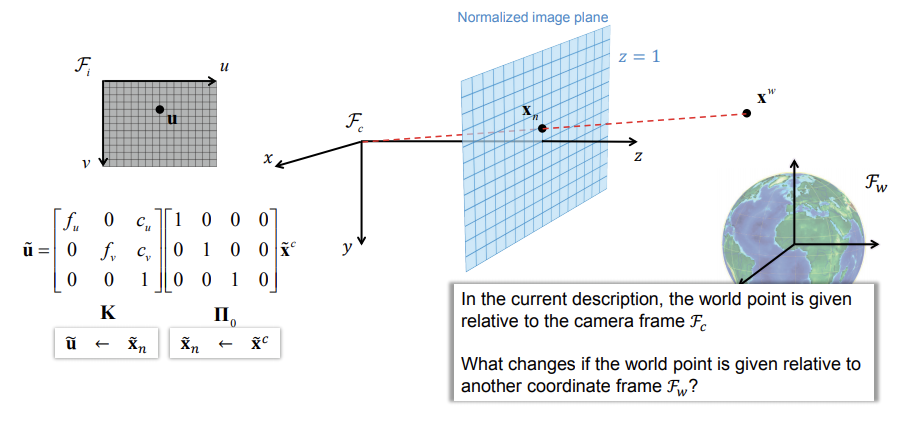
-
The pose of the world frame relative to the camera frame, denoted by \(T_{cw}\), is also a point transformation from \(F_w\) to \(F_c\)
-
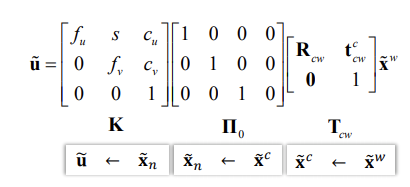
General perspective camera model
-
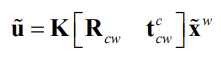
By multiplying \(\Pi_0\) with \(T_{wc}\) we get a very compact expression that is commonly used to represent the perspective camera model
-
We refer to \(K\) as the intrinsic part and \([R_{cw} t_{cw}^c]\) as the extrinsic part of the perspective camera model
-
The matrix \(K[R_{cw} t_{cw}^c]\) is often denoted by \(P\) and referred to as camera’s projection matrix
-
Alternative formulation
 where we have used that
where we have used that
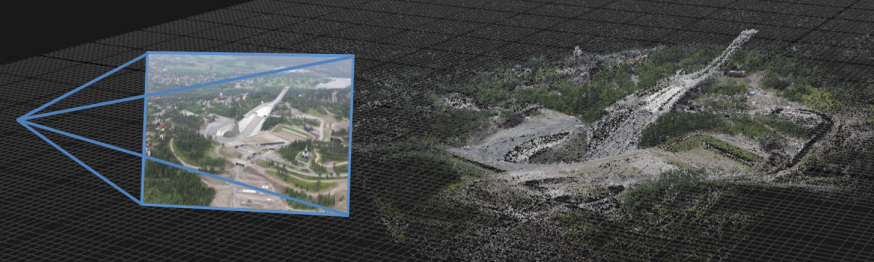
Pose from a known 3D map
Pose estimation
- Pose estimation given a map is sometimes called localization
- In visual localization, this is sometimes also called tracking
-
Tracking the map in the image frames
-
How can we track a map with a camera?
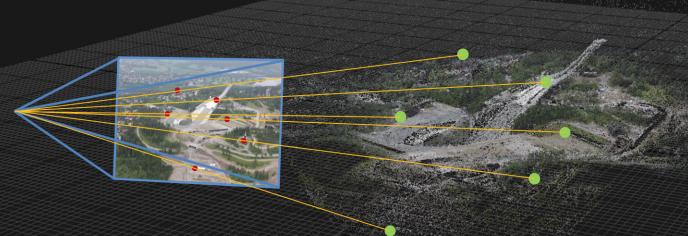
Pose from known 3D surface
-
Minimize photometric error

-
Minimize geometric error (indirect tracking)

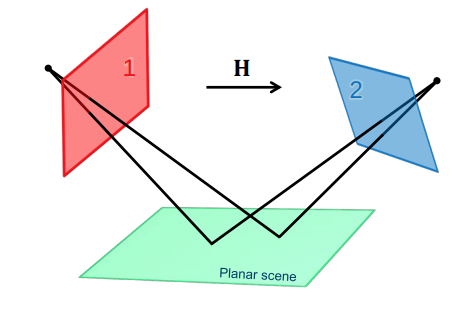
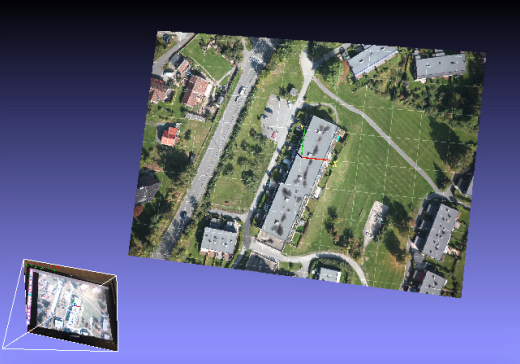
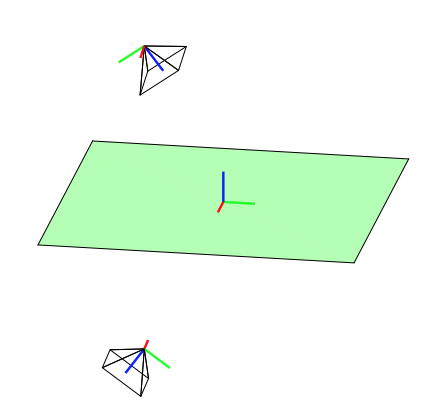
Pose estimation relative to a world plane
Choose the world coordinate system so that the xy-plane corresponds to a plane \(\Pi\) in the scene
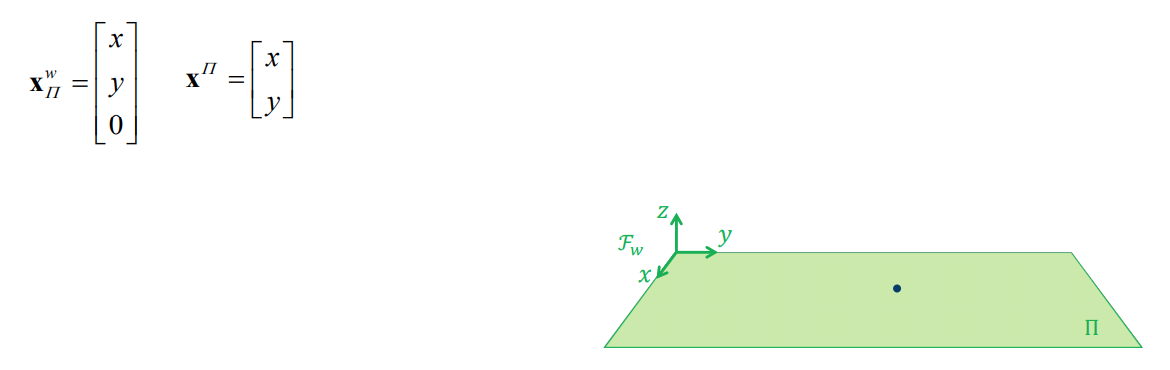 We can map points on the world plane into image coordinates by using the perspective camera model
We can map points on the world plane into image coordinates by using the perspective camera model
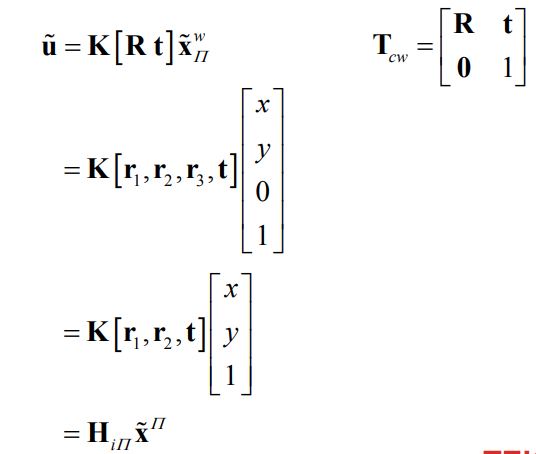
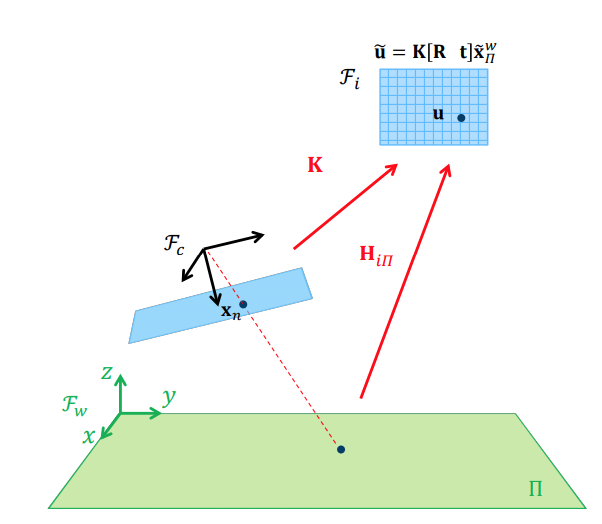
⇒ For a calibrated camera, we have a relation between the camera pose and the homography between the world plane and the image!
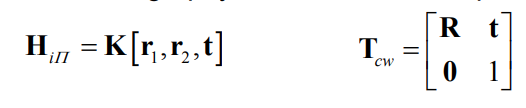
Assume a perfect, noise-free homography between the world plane and the
image: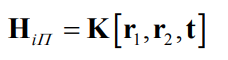 Then, because of scale ambiguity:
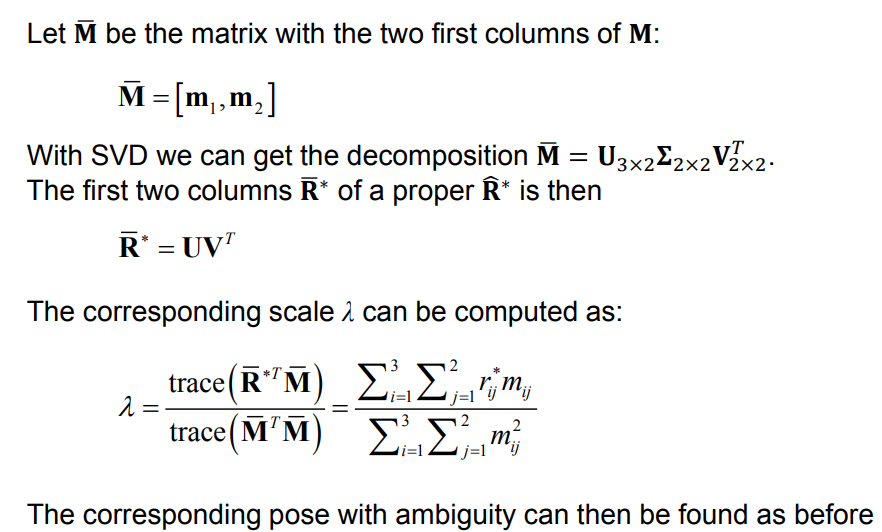
Then, because of scale ambiguity: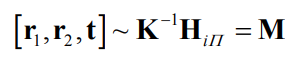 Since the columns of rotation matrices have unit norm, we can also find a scale factor λ so that the first two columns of M get unit norm.
We then have the two possible solutions:
Since the columns of rotation matrices have unit norm, we can also find a scale factor λ so that the first two columns of M get unit norm.
We then have the two possible solutions: The last column in \(\hat{R}\) is given by the cross product of the two first columns:
The last column in \(\hat{R}\) is given by the cross product of the two first columns: where the sign is chosen so that \(det(\hat{R}) = 1\)
We are now able to reconstruct the camera pose in the world coordinate system for each of the two solutions:
where the sign is chosen so that \(det(\hat{R}) = 1\)
We are now able to reconstruct the camera pose in the world coordinate system for each of the two solutions:

 It is in practice simple find the correct solution because only one side of the plane is typically visible
It is in practice simple find the correct solution because only one side of the plane is typically visible
- With a homography estimated from point correspondences, this approach will typically not give proper rotation matrices because of noise
- But it is possible to find the closest rotation matrix (in the Frobenius-norm sense) with SVD!
 Pose estimation relative to a world plane
Pose estimation relative to a world plane
Summary
- Direct methods based on minimizing photometric
error

- Indirect methods based on minimizing geometric
error
- Homography-based method
An introduction to nonlinear least squares
How can solve the indirect tracking problem?
Minimize geometric error with nonlinear least squares!
Problem formulation
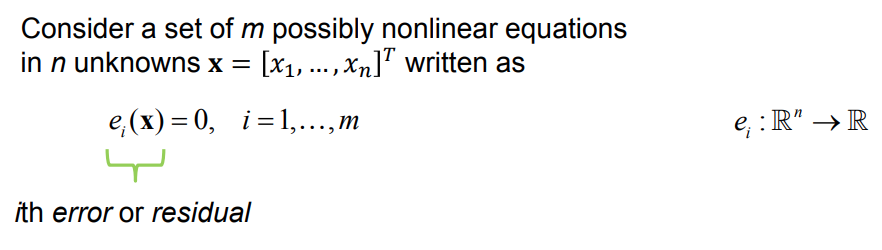
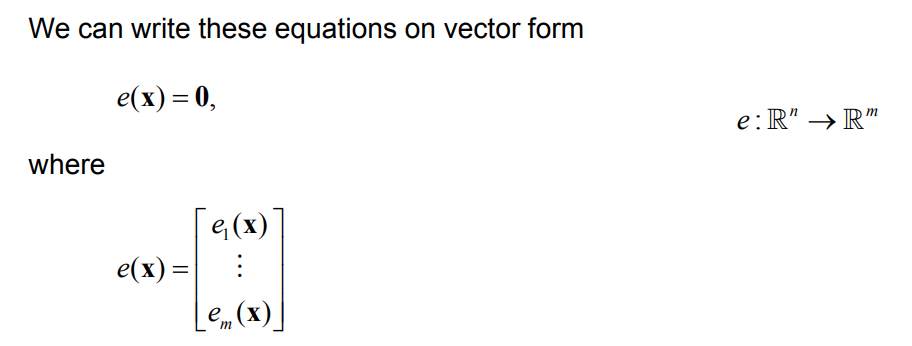
It is often not possible to find an exact solution to this problem.
We can instead seek an approximate solution that minimizes the sum of squares of the residuals
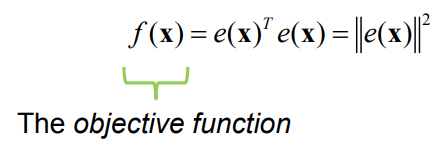
This means that we want to find the 𝐱𝐱 that minimizes the objective
function: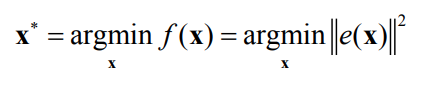
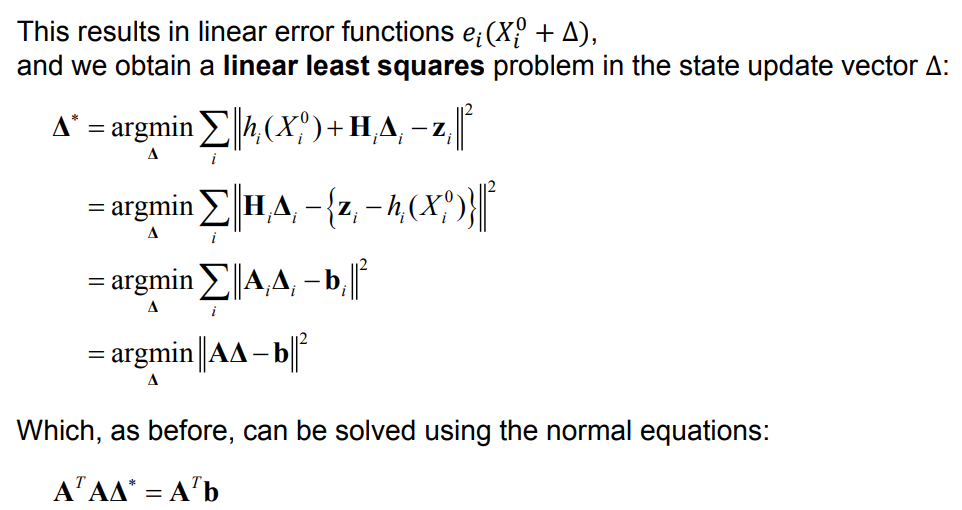
Linear least squares
When the equations are linear, we can obtain an objective function on the form
 A solution is required to have zero gradient:
A solution is required to have zero gradient:
 This results in the normal equations,
This results in the normal equations,
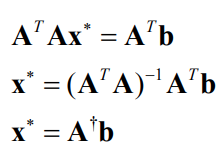 which can be solved with Cholesky- or QR factorization.
which can be solved with Cholesky- or QR factorization.
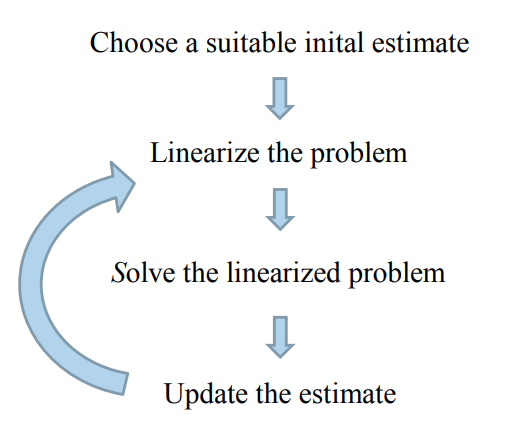
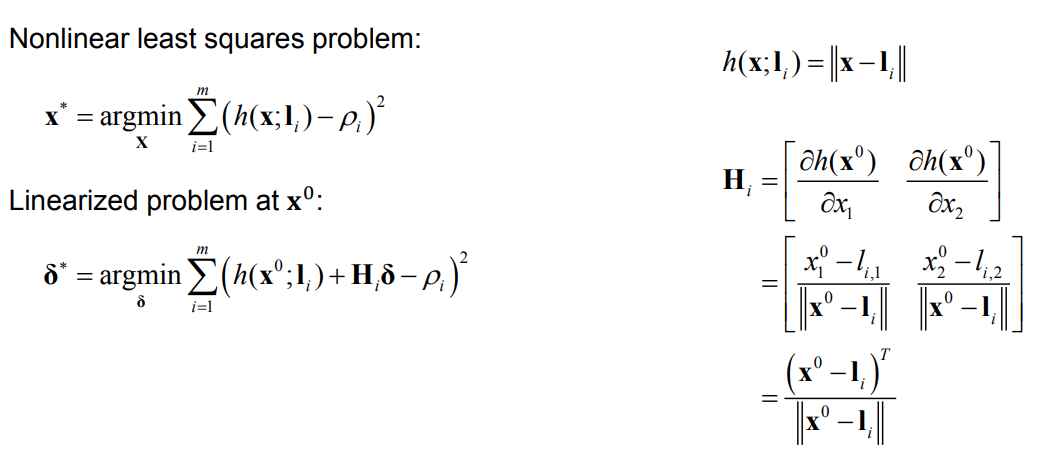
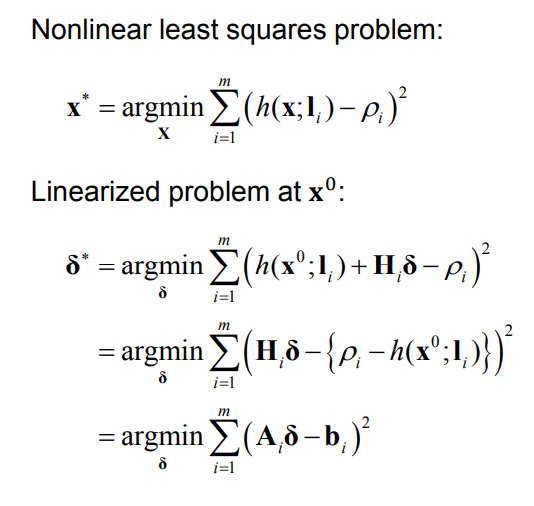
Nonlinear least squares
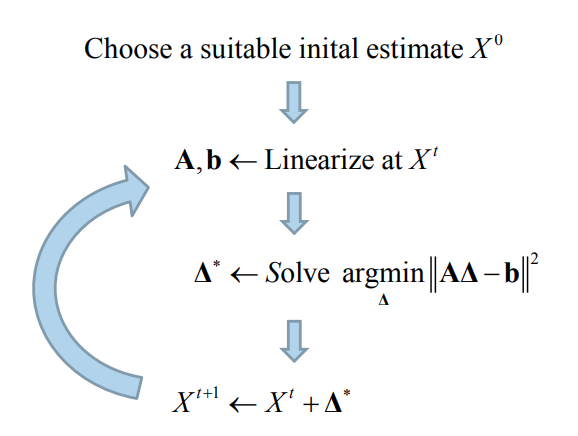
Nonlinear least squares problems cannot be solved directly, but require an iterative procedure starting from a suitable initial estimate:
We will use nonlinear least squares to solve state estimation problems based on measurements and corresponding measurement models
 We say that \(X_i\) are the state variables involved in measurement \(z_i\)
We are interested in estimating the unknown state variables \(X\), given the measurements \(Z\).
The Maximum a Posteriori estimate is given by:
We say that \(X_i\) are the state variables involved in measurement \(z_i\)
We are interested in estimating the unknown state variables \(X\), given the measurements \(Z\).
The Maximum a Posteriori estimate is given by:
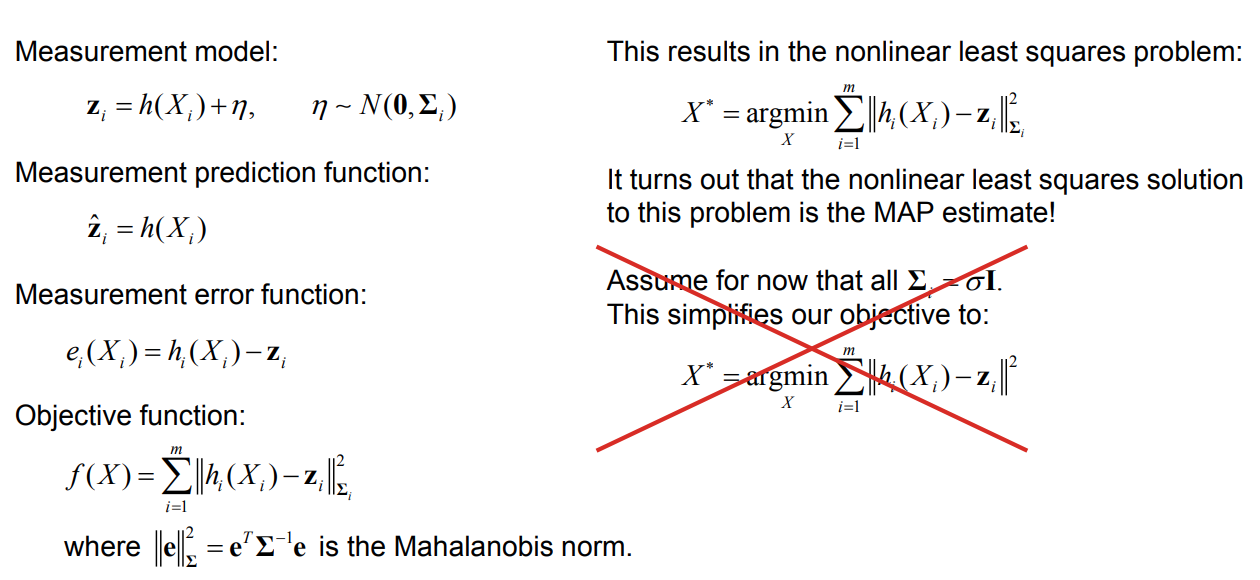
Nonlinear MAP inference for state estimation
Measurement model:
 Measurement prediction function:
Measurement prediction function:
 Measurement error function:
Measurement error function:
 Objective function:
Objective function:
 This results in the nonlinear least squares problem:
This results in the nonlinear least squares problem:
 It turns out that the nonlinear least squares solution
to this problem is the MAP estimate!
It turns out that the nonlinear least squares solution
to this problem is the MAP estimate!
Assume for now that all
 This simplifies our objective to:
This simplifies our objective to:
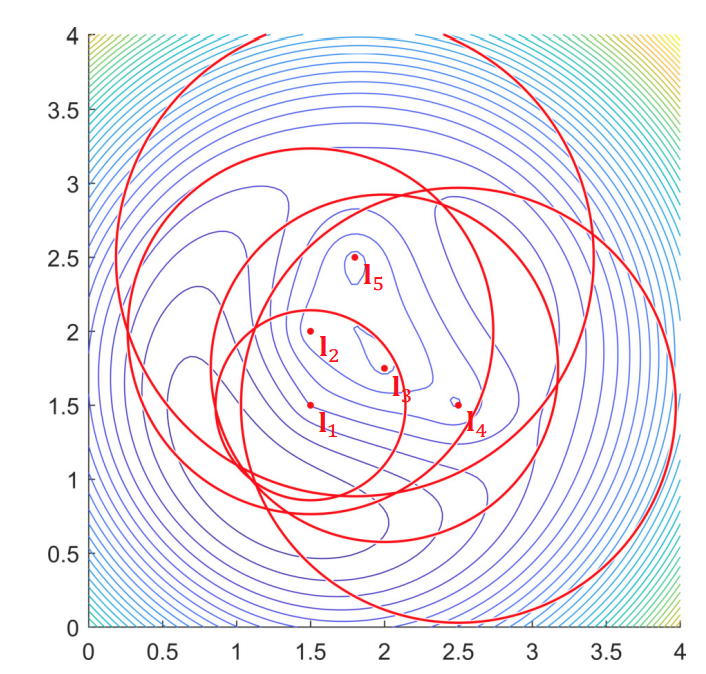
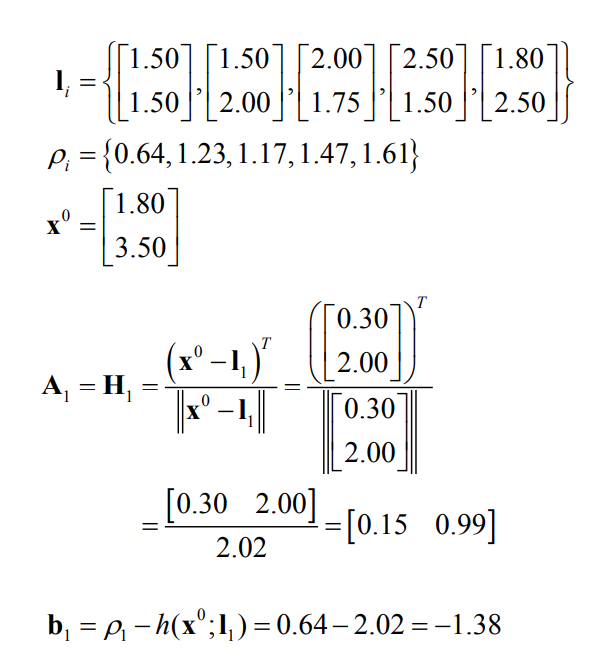
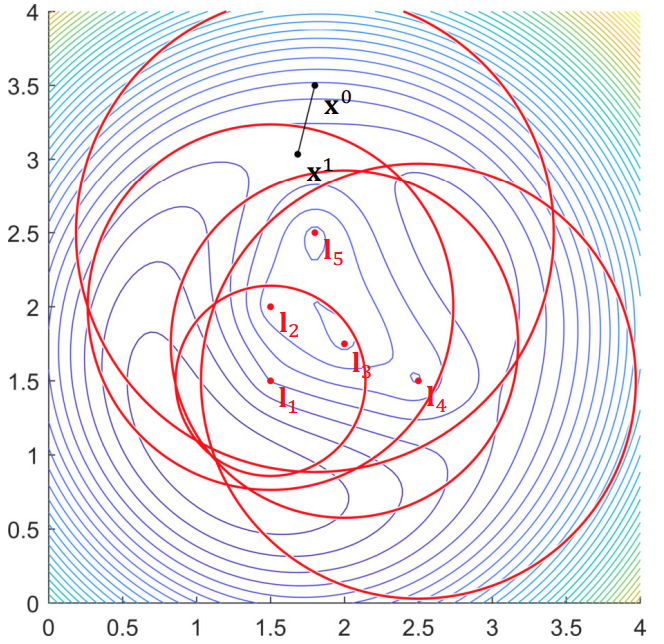
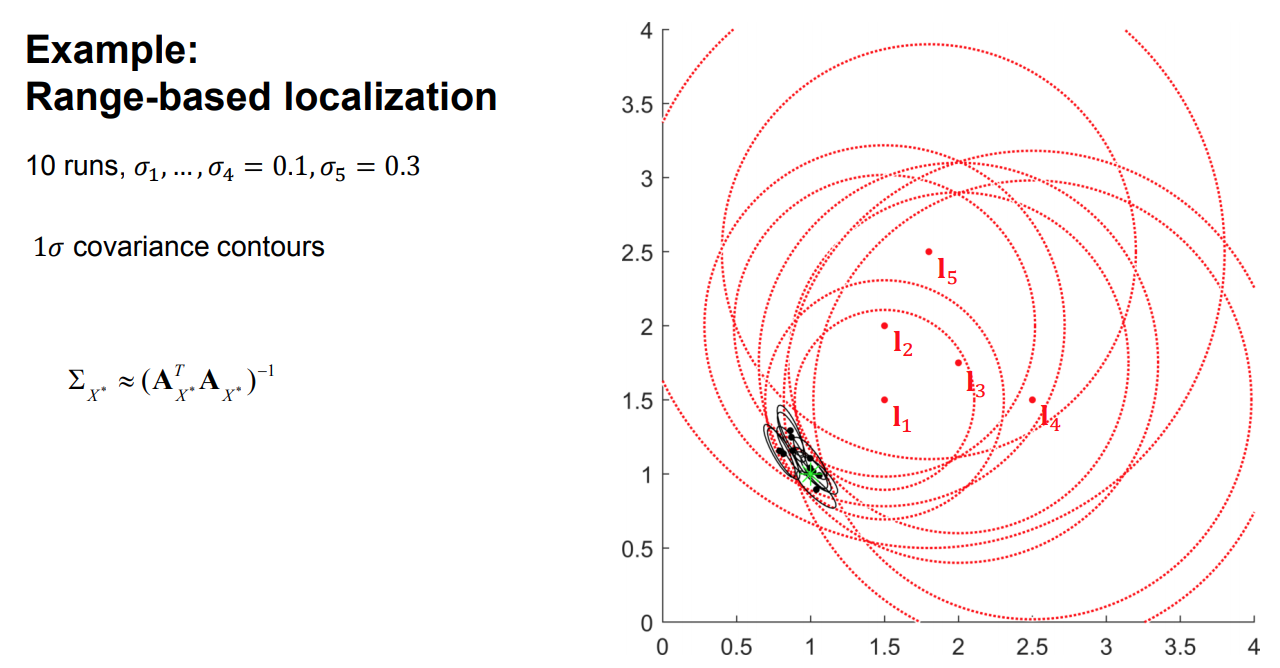
Example: Range-based localization
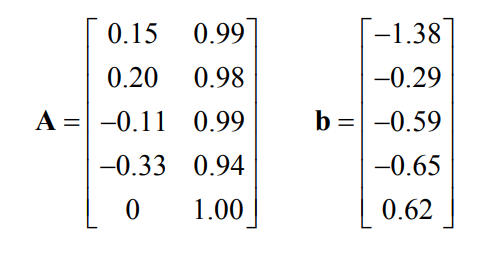
Linearization
We can linearize all measurement prediction functions \(h_i(X_i)\) using a simple Taylor expansion at a suitable initial estimate \(X^0\):
 where the measurement Jacobian \(H_i\) is
where the measurement Jacobian \(H_i\) is
 and
and
 is the state update vector.
is the state update vector.
Solving the linearized problem
Example: Range-based localization
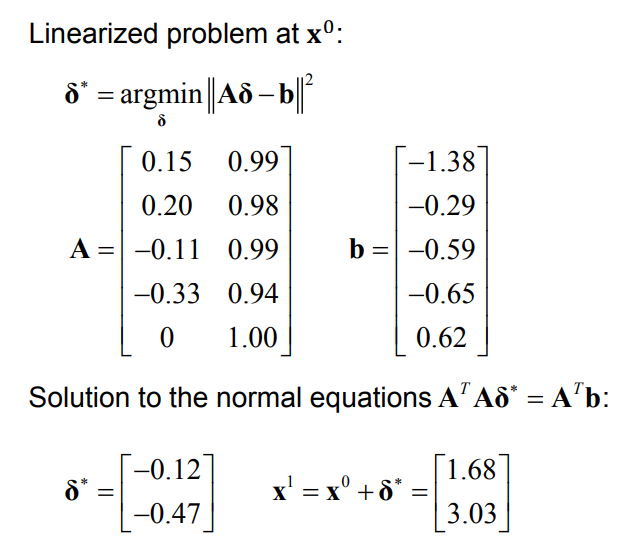
Solving the nonlinear problem
We solve the nonlinear least-squares problem by iteratively solving the linearized system:
The Gauss-Newton algorithm
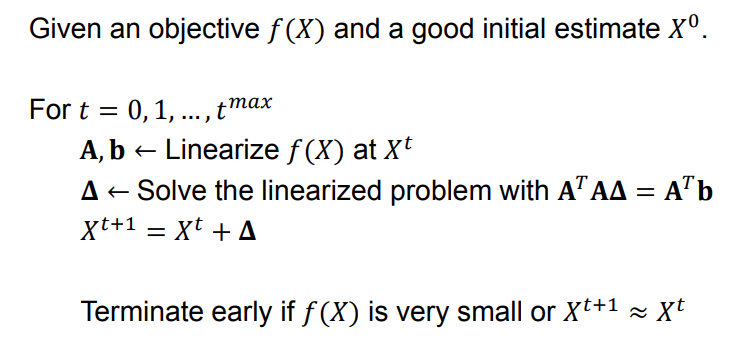 Gauss-Newton actually approximates the Hessian of the objective \(f(x)\) as
Gauss-Newton actually approximates the Hessian of the objective \(f(x)\) as
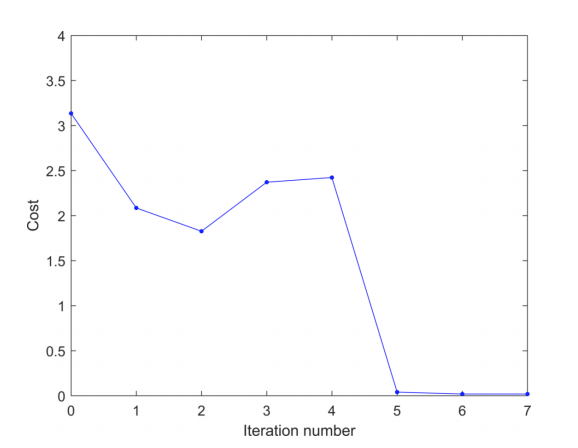
 This approximation is good if we are near the solution and the objective is nearly quadratic.
When the approximation is good:
- The update direction is good
- The update step length is good
- We obtain almost quadratic convergence to a local minimum
When the approximation is poor:
- The update direction is typically still decent
- The update step length may be bad
- The convergence is slower, and we may even diverge
This approximation is good if we are near the solution and the objective is nearly quadratic.
When the approximation is good:
- The update direction is good
- The update step length is good
- We obtain almost quadratic convergence to a local minimum
When the approximation is poor:
- The update direction is typically still decent
- The update step length may be bad
- The convergence is slower, and we may even diverge
Example: Range-based localization
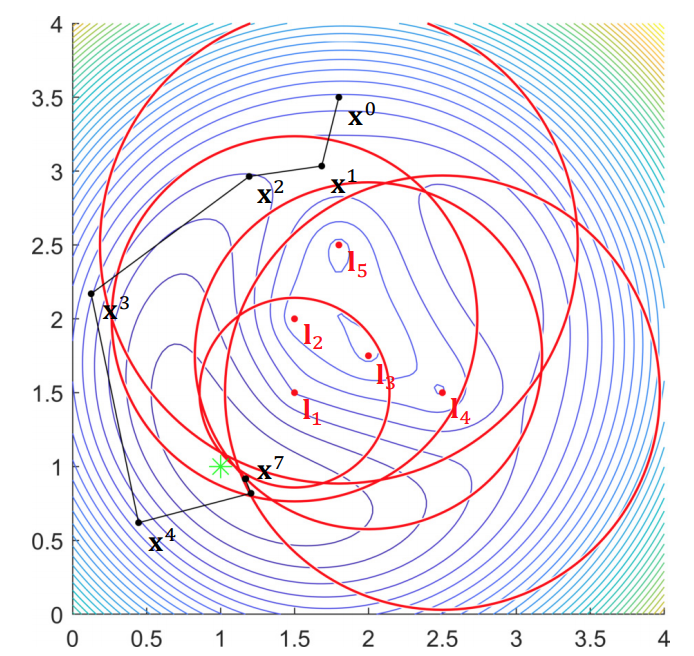
Trust region
- The Gauss-Newton method is not guaranteed to converge because of the approximate Hessian matrix
- Since the update directions typically are decent,
we can help with convergence by limiting the step sizes
- More conservative towards robustness, rather than speed
- Such methods are often called trust region methods, and one example is Levenberg-Marquardt
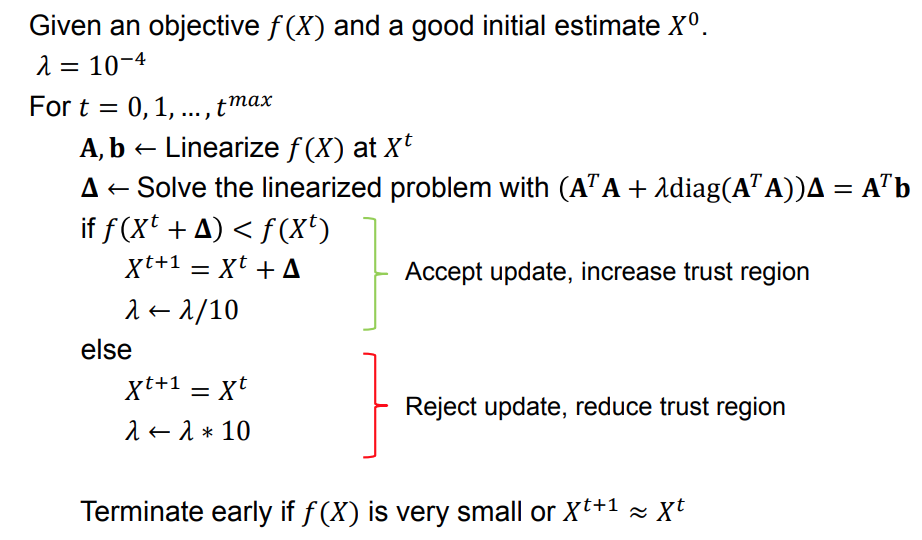
The Levenberg-Marquardt algorithm
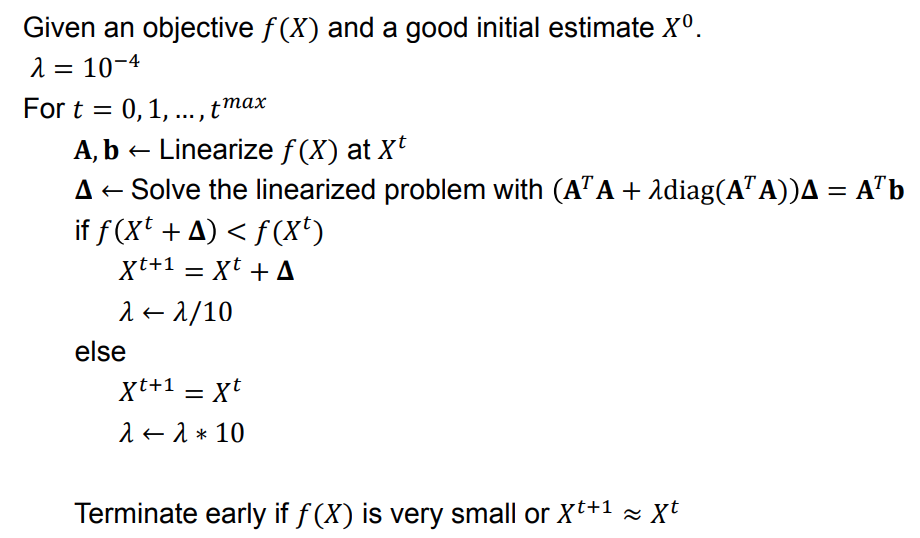
Levenberg-Marquardt optimization
##Nonlinear MAP inference for state estimation
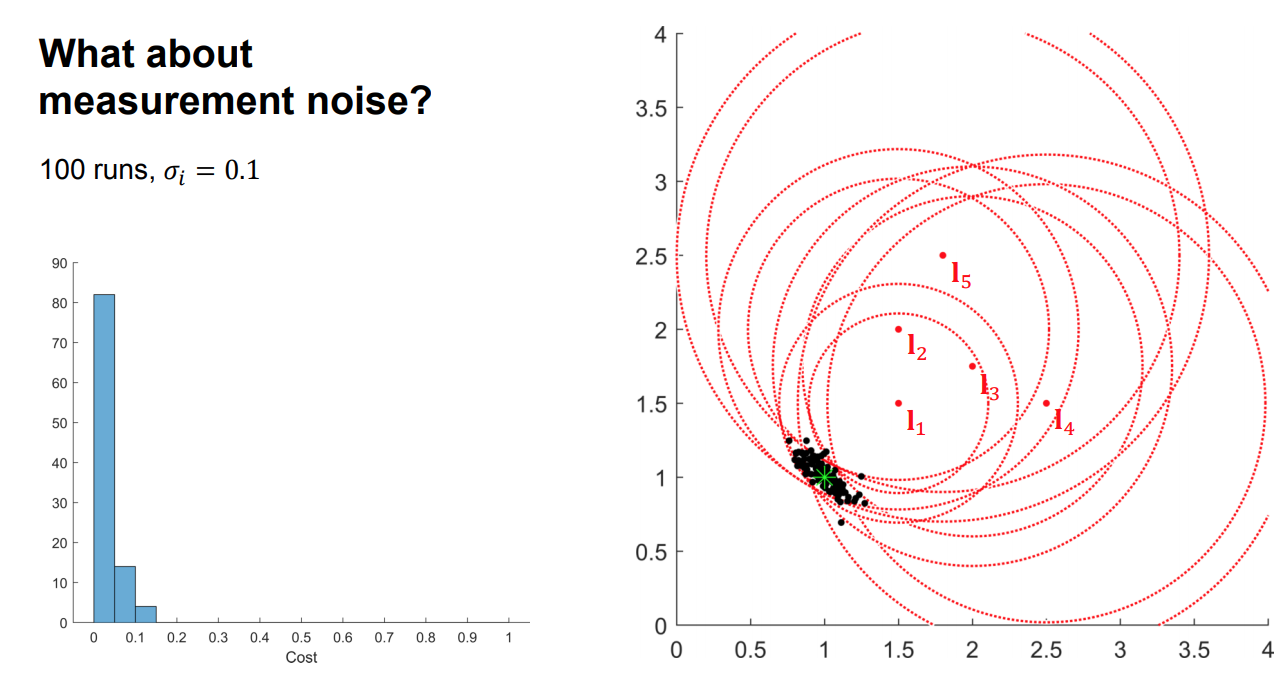
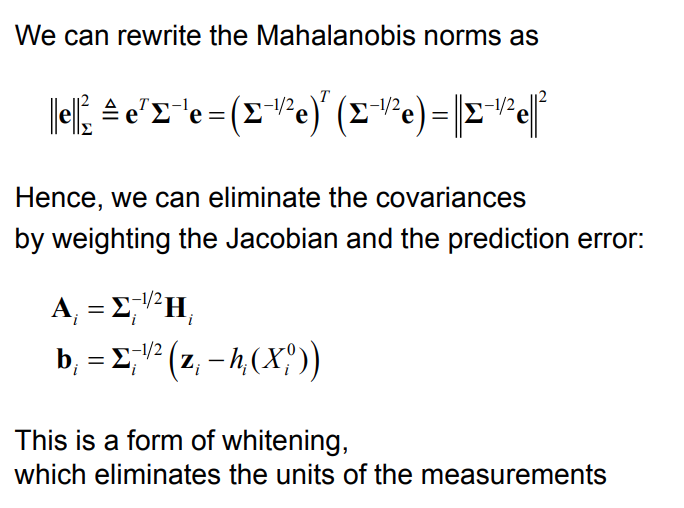
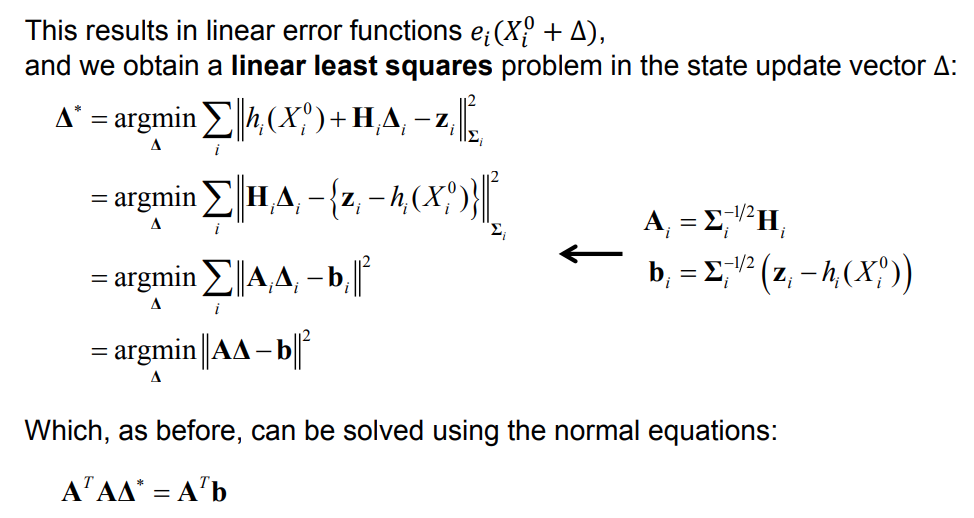
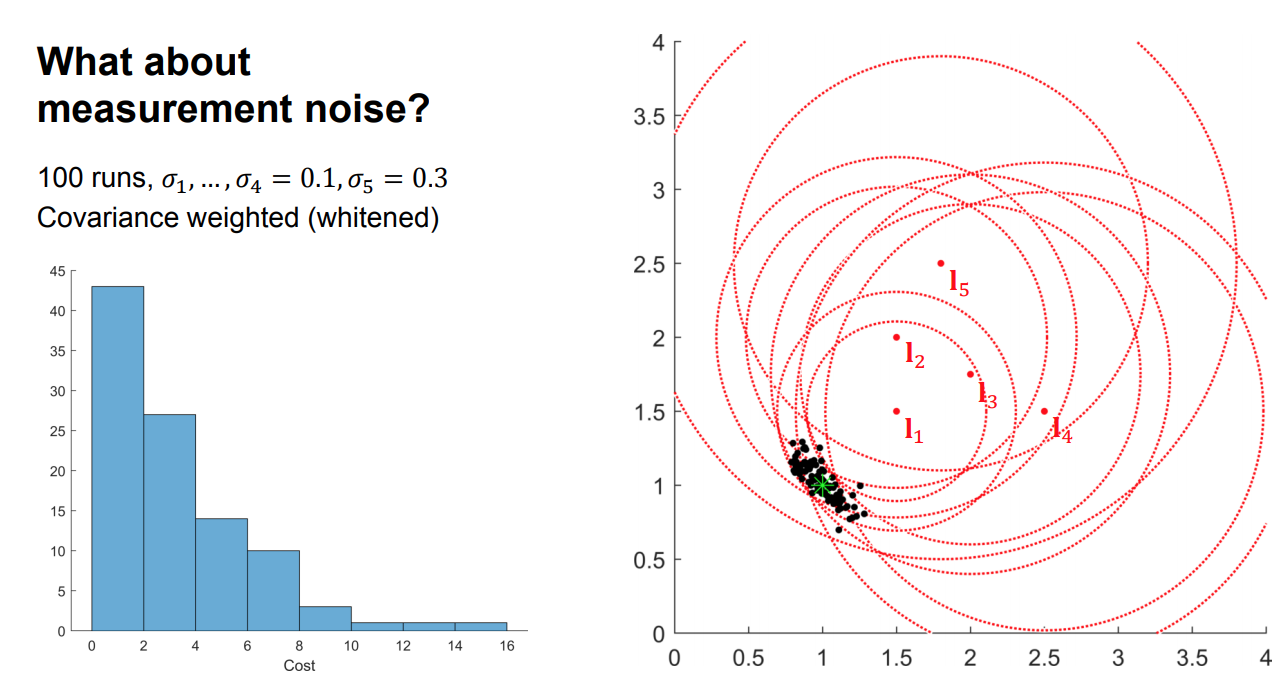
What about measurement noise?
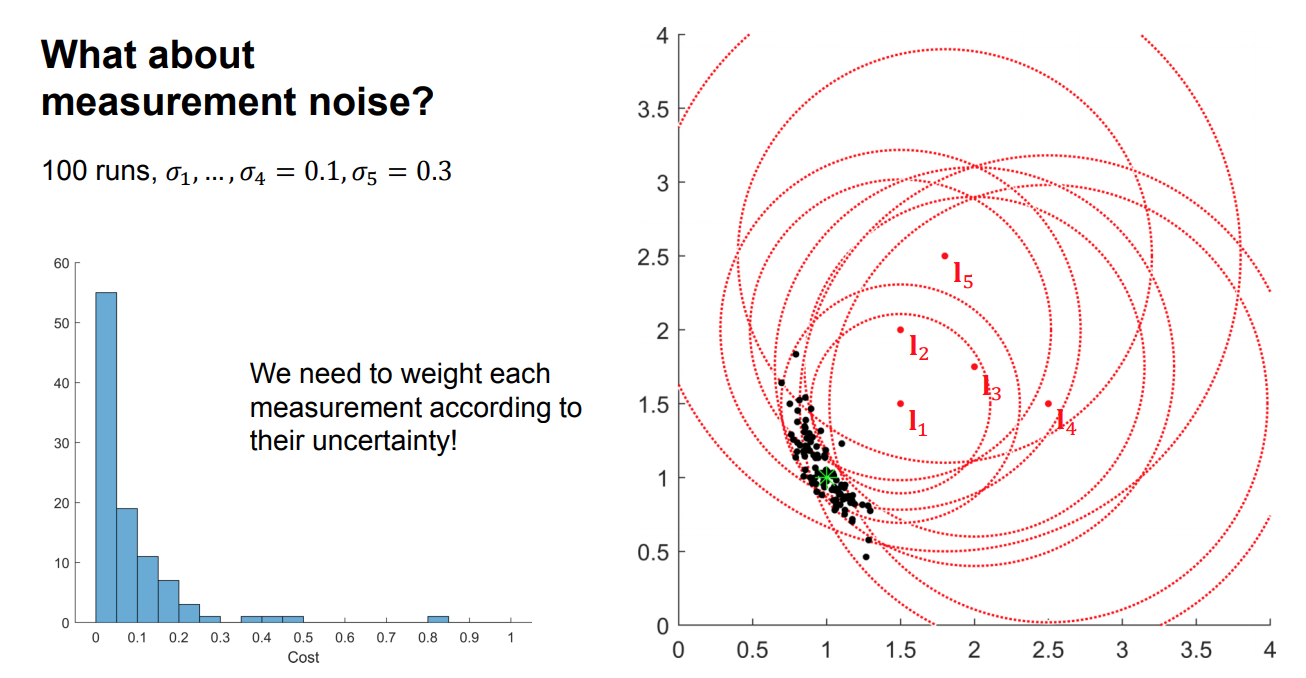
Weighted nonlinear least squares
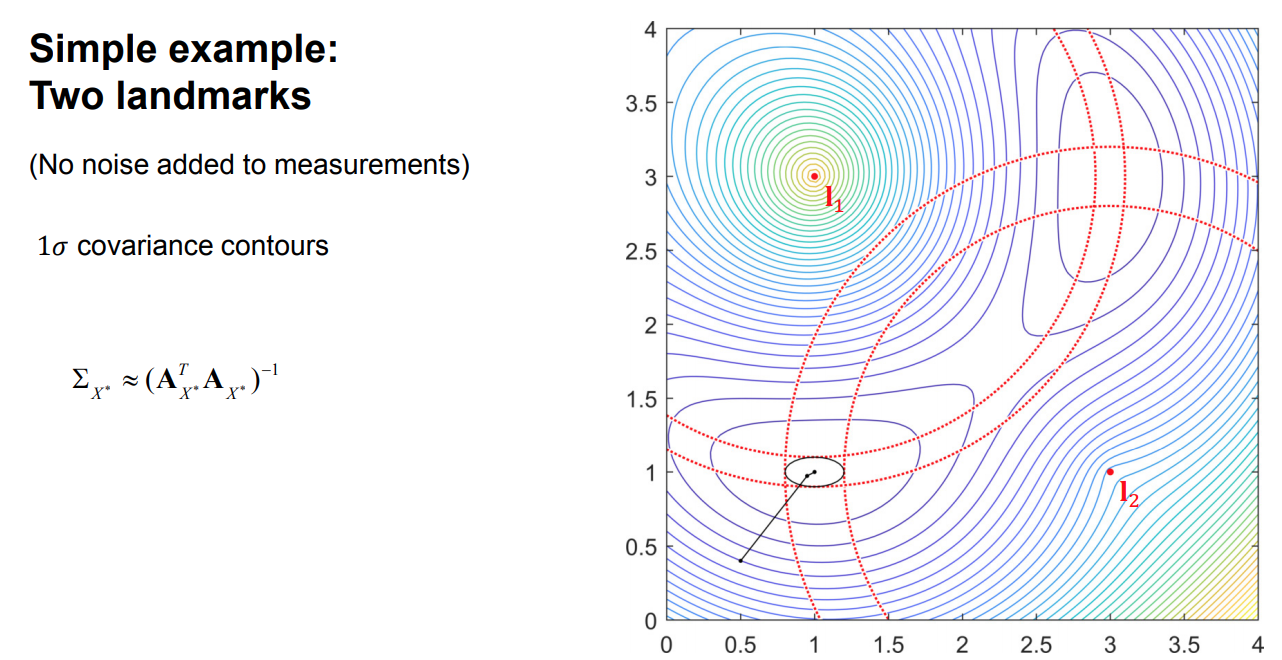
Estimating uncertainty in the MAP estimate
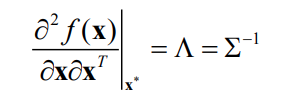
The Hessian at the solution for the weighted problem
is the inverse of the covariance matrix (the information matrix)!
 Using our approximated Hessian, we obtain a first order approximation of the true covariance for all states
Using our approximated Hessian, we obtain a first order approximation of the true covariance for all states
Examples
Optimizing over poses
Nonlinear state estimation
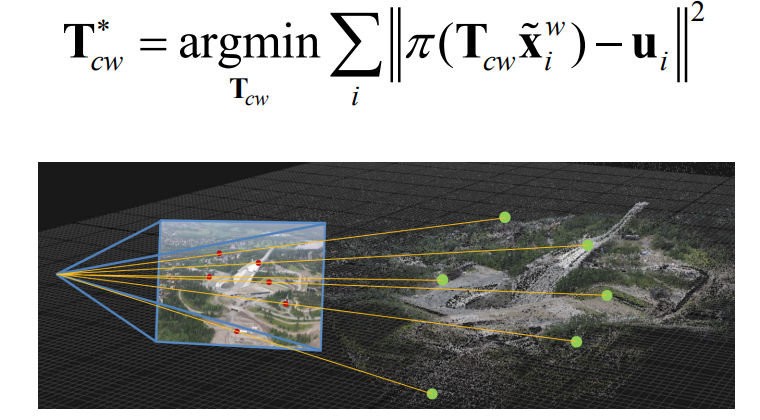
We have seen how we can find the MAP estimate of our unknown states given measurements by representing it as a nonlinear least squares problem Δ Δ AΔ b , Linearize at tX←A b argmin ( ) i m i i i X i X h X∗ = = −∑ Σz argmax ( | )MAP X X p X Z= The indirect tracking method argmin ( ) cw w cw cw i i i π∗ = −∑ T T T x u Minimize geometric error over the camera pose Rotations and poses are Lie groups Rotations in 3D: Poses in 3D: Rotations and poses are Lie groups Rotations in 3D: Poses in 3D: Rotations and poses are not vector spaces! (They lie on manifolds) Nonlinear state estimation We have seen how we can find the MAP estimate of our unknown states give measurements by representing it as a nonlinear least squares problem Δ Δ AΔ b , Linearize at tX←A b argmin ( ) i m i i i X i X h X∗ = = −∑ Σz argmax ( | )MAP X X p X Z= Rotations and poses are not vector spaces! (They lie on manifolds) How do we optimize? The corresponding Lie algebra Rotations in 3D: The corresponding Lie algebra Rotations in 3D: Remember the axis-angle representation: 𝜙𝜙 𝐯𝐯 ( )cos 1 cos sinTab φ φ φ ∧= + − +R I vv v The corresponding Lie algebra Rotations in 3D: Remember the axis-angle representation: ( )cos 1 cos sinTab φ φ φ ∧= + − +R I vv v 𝜙𝜙 𝐯𝐯 When 𝜙𝜙 is small: cos 𝜙𝜙 ≈ 1 sin 𝜙𝜙 ≈ 𝜙𝜙 ( )cos 1 cos sinTab φ φ φ φ ∧ ∧ ∧ = + − + ≈ + = + R I vv v I v I ω The corresponding Lie algebra Rotations in 3D: Remember the axis-angle representation: 𝜙𝜙 𝐯𝐯 When 𝜙𝜙 is small: cos 𝜙𝜙 ≈ 1 sin 𝜙𝜙 ≈ 𝜙𝜙 The corresponding Lie algebra Rotations in 3D: Poses in 3D: The corresponding Lie algebra Rotations in 3D: Poses in 3D: The corresponding Lie algebras are vector spaces! We can relate the group and algebra through the matrix exponential and matrix logarithm Relation between group and algebra We can relate the group and algebra through the matrix exponential and matrix logarithm Relation between group and algebra Tangent space The Lie algebra is the tangent space around the identity element of the group
- The tangent space is the “optimal” space in which to represent differential quantities related to the group
- The tangent space is a vector space with the same dimension as the number of degrees of freedom of the group transformations Dellaert, F., & Kaess, M. (2017). Factor Graphs for Robot Perception Perturbations We can represent steps and uncertainty as perturbations in the tangent space exp( )∧=T ξ T exp( )∧=R ω R Jacobians for perturbations on SO(3) ( )exp( ) [ ] ∧ = ∂ ⊕ = − ⊕ ∂ ω 0 ω R x R x ω ( )exp( )∧∂ ⊕ ∂ ⊕ = = ∂ ∂ ω R x R x R x x ⊕ =R x RxGroup action on points: Jacobians for perturbations on SE(3) ( ) exp( ) [ ] ∧ × = ∂ ⊕ = − ⊕ ∂ ξ 0 ξ T x I T x ξ ( )exp( )∧∂ ⊕ ∂ ⊕ = = ∂ ∂ ξ T x T x R x x ⊕ = +T x Rx tGroup action on points: Summary
- Updates on rotations and poses as perturbations using Lie algebra
- Jacobians for these perturbations
- We are ready to solve exp( )∧=R ω R exp( )∧=T ξ T argmin ( ) cw w cw cw i i i π∗ = −∑ T T T x u Supplementary material
- Ethan Eade, “Lie Groups for 2D and 3D transformations”
- José Luis Blanco Claraco, “A tutorial on SE(3) transformation parameterizations and on-manifold optimization” Chapter 7 http://ethaneade.com/lie.pdf http://ingmec.ual.es/%7Ejlblanco/papers/jlblanco2010geometry3D_techrep.pdf Lecture 6.3�Optimizing over poses Nonlinear state estimation The indirect tracking method Rotations and poses are Lie groups Nonlinear state estimation The corresponding Lie algebra Relation between group and algebra Tangent space Perturbations Jacobians for perturbations on SO(3) Jacobians for perturbations on SE(3) Summary Supplementary material PowerPoint Presentation Lecture 6.4 Nonlinear pose estimation Trym Vegard Haavardsholm The indirect tracking method argmin ( ) cw w cw cw i i i π∗ = −∑ T T T x u Minimize geometric error over the camera pose This is also sometimes called Motion-Only Bundle Adjustment Nonlinear state estimation We have seen how we can find the MAP estimate of our unknown states given measurements by representing it as a nonlinear least squares problem Δ Δ AΔ b , Linearize at tX←A b argmin ( ) i m i i i X i X h X∗ = = −∑ Σz argmax ( | )MAP X X p X Z= Objective function Minimize error over the state variable The optimization problem is For simpler notation, we assume that the measurements are pre-calibrated to normalized image coordinates ,argmin ( ( , )) j w wc j n j X j X gπ∗ = −∑ ΣT x x wcX = T Objective function Minimize error over the state variable The optimization problem is For simpler notation, we assume that the measurements are pre-calibrated to normalized image coordinates ,argmin ( ( , )) j w wc j n j X j X gπ∗ = −∑ ΣT x x wcX = T u n v u c f v c f − − = = − u x K (and distortion…) Measurement prediction This gives us the measurement prediction function ˆ ( ; ) ( ( , ))w wn wc wch gπ= =x T x T x Measurement prediction This gives us the measurement prediction function where ˆ ( ; ) ( ( , ))w wn wc wch gπ= =x T x T x ( , ) ( ) ˆ1 ˆ( ) ˆ c w T w w c c wc wc wc c nc nc c n x g y z xx yz y π = − = = = = = T x R x t x x x (Coordinate transformation) (Camera model) Linearization We can linearize the measurement prediction function with a local Taylor expansion where is a small perturbation in the camera frame. The measurement Jacobian is given by ( exp( ); ) ( ; )w wwc wch h ∧ ∆ ∆≈ +T ξ x T x Fξ ( , )0 0 ( exp( ); ) ( exp( ), )( ) c w wc w wc wc wc c g h gπ∧ ∧ == = ∂ ∂∂ = = ∂ ∂ ∂x T xξ ξ T ξ x T ξ xxF ξ x ξ exp( )∧∆ξ Jacobians ( , ) ( )w T w w cwc wc wcg = − =T x R x t x ( exp( ), )wwcg ∧ = ∂ ∂ ξ T ξ x ξ Jacobians ( exp( ), ) ( exp( ))w wwc wcg ∧ ∧ − = = ∂ ∂ ⊕ = ∂ ∂ξ ξ T ξ x T ξ x ξ ξ ( , ) ( )w T w w cwc wc wcg = − =T x R x t x Jacobians ( exp( ), ) ( exp( )) (exp( ) ) w w wc wc w wc g ∧ ∧ − = = ∧ − = ∂ ∂ ⊕ = ∂ ∂ ∂ − ⊕ = ∂ ξ ξ ξ T ξ x T ξ x ξ ξ ξ T x ξ Jacobians ( exp( ), ) ( exp( )) (exp( ) ) w w wc wc w wc w cw g ∧ ∧ − = = ∧ − = ∧ = ∂ ∂ ⊕ = ∂ ∂ ∂ − ⊕ = ∂ ∂ ⊕ = − ∂ ξ ξ ξ T ξ x T ξ x ξ ξ ξ T x ξ ξ T x ξ Jacobians ( exp( ), ) ( exp( )) (exp( ) ) [ ] w w wc wc w wc w cw w cw g ∧ ∧ − = = ∧ − = ∧ = ∧ × ∂ ∂ ⊕ = ∂ ∂ ∂ − ⊕ = ∂ ∂ ⊕ = − ∂ = − − ⊕ ξ ξ ξ T ξ x T ξ x ξ ξ ξ T x ξ ξ T x ξ I T x Jacobians ( exp( ), ) ( exp( )) (exp( ) ) [ ] w w wc wc w wc w cw w cw c g ∧ ∧ − = = ∧ − = ∧ = ∧ × ∧ × ∂ ∂ ⊕ = ∂ ∂ ∂ − ⊕ = ∂ ∂ ⊕ = − ∂ = − − ⊕ = − ξ ξ ξ T ξ x T ξ x ξ ξ ξ T x ξ ξ T x ξ I T x I x Jacobians c c c x z y π = x ( , ) ( ) c w wc c g π = ∂ ∂ x T x x Jacobians c c c x z y π = x ( , ) wc c cc c c c c g x z z y z π = −∂ = ∂ − x T x x Jacobians ( , ) c w wc c cc c c c c g n x z z y z x d y π = −∂ = ∂ − − = − x T x x cd z = Jacobians ( , )0 0 ( exp( ); ) ( exp( ), )( ) c w wc w wc wc wc c g h gπ∧ ∧ == = ∂ ∂∂ = = ∂ ∂ ∂x T xξ ξ T ξ x T ξ xxF ξ x ξ Jacobians ( , )0 0 ( exp( ); ) ( exp( ), )( ) [ ] c w wc w wc wc wc c g n c n h g x d y π∧ ∧ == = ∧ × ∂ ∂∂ = = ∂ ∂ ∂ − = − − x T xξ ξ T ξ x T ξ xxF ξ x ξ I x ( , )0 0 ( exp( ); ) ( exp( ), )( ) [ ] c w wc w wc wc wc c g n c n n n n n n h g x d y d dx x y x y d dy y x y x π∧ ∧ == = ∧ × ∂ ∂∂ = = ∂ ∂ ∂ − = − − − − − = − + − − x T xξ ξ T ξ x T ξ xxF ξ x ξ I x Jacobians Linear least-squares We can then obtain a linear least-squares problem ,argmin ( ; ) j w wc j j n j j h ∆ ∗ ∆ ∆= + −∑ Σξξ T x F ξ x Linear least-squares { } , argmin ( ; ) j w wc j j n j j w j n j wc j j h ∆ ∗ ∆ ∆ ∆ = + − = − − ∑ Σξ ξ T x F ξ x F ξ x T x We can then obtain a linear least-squares problem Linear least-squares We can then obtain a linear least-squares problem { } , argmin ( ; ) argmin j w wc j j n j j w j n j wc j j j j j h ∆ ∗ ∆ ∆ ∆ = + − = − − = − ∑ Σξ ξ ξ T x F ξ x F ξ x T x A ξ b Linear least-squares We can then obtain a linear least-squares problem { } , argmin ( ; ) argmin j w wc j j n j j w j n j wc j j j j j h ∆ ∗ ∆ ∆ ∆ = + − = − − = − ∑ Σξ ξ ξ T x F ξ x F ξ x T x A ξ b Aξ b Linear least-squares With the state update vector For an example with three points, the measurement Jacobian A and the prediction error b are ∆ξ = = A b A A b b A b Solution to the linearized problem The solution can be found by solving the normal equations ( )T T∗∆ =A A ξ A b Δ Δ AΔ b , Linearize at tX←A b Gauss-Newton optimization Given a good initial estimate . For 𝑡𝑡 = 0, 1, … , 𝑡𝑡𝑚𝑚𝑚𝑚𝑚𝑚 𝐀𝐀,𝐛𝐛 ← Linearize at ← Solve the linearized problem with
- ∗∧ ∆←T T ξ t wcT ( )T T∗∆ =A A ξ A b∗∆ξ Example Pose estimation relative to known 3D points
- n-Point Pose Problem (PnP)
- Typically fast non-iterative methods
- Minimal in number of points
- Accuracy comparable to iterative methods
- Good initial estimates
- Examples
- P3P, EPnP
- P4Pf
- Estimate pose and focal length
- P6P
- Estimates P with DLT
- R6P
- Estimate pose with rolling shutter Summary
- Pose estimation relative to a world plane
- Pose from homography
- Nonlinear optimization over poses
- Pose estimation relative to known 3D points
- Iterative methods
- PnP Lecture 6.4�Nonlinear pose estimation The indirect tracking method Nonlinear state estimation Objective function Measurement prediction Linearization Jacobians Linear least-squares Solution to the linearized problem Gauss-Newton optimization Example Pose estimation relative to known 3D points Summary